欢迎浏览厦门控匠自动化科技有限公司


行业资讯
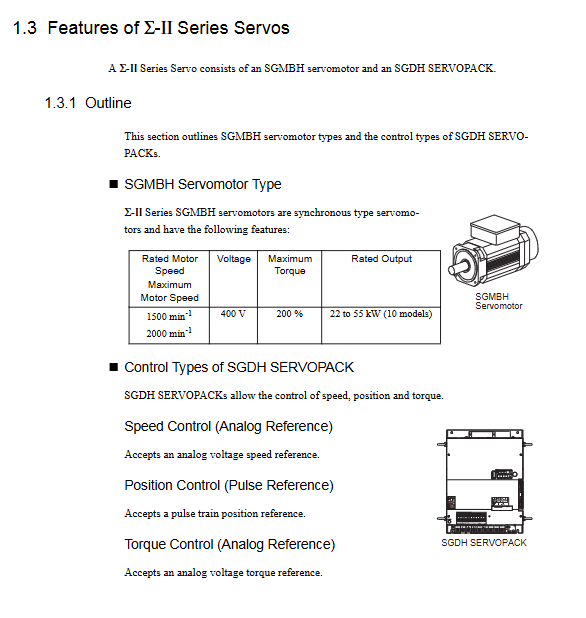
Yaskawa Σ-II 系列 SGMBH 伺服电机 + SGDH 伺服驱动器
时间: 2026-04-22浏览次数:
Yaskawa Σ-II 系列 SGMBH 伺服电机 + SGDH 伺服驱动器
Yaskawa Σ-II 系列 SGMBH 伺服电机 + SGDH 伺服驱动器
产品基础信息
产品组合:安川 Σ-II 系列 SGMBH 伺服电机 + SGDH 伺服驱动器
电压等级:400V 级(380–480VAC)
功率范围:22kW / 30kW / 37kW / 45kW / 55kW
编码器:增量式 / 17 位 / 20 位绝对式
手册编号:SIE-S800-32.4,2002 版
适用:大功率、高精度定位、速度 / 转矩控制设备
安全规范(强制)
断电后等待 5 分钟,确认 CHARGE 灯熄灭再操作
接地电阻 **≤100Ω**,单点接地
电机带风扇冷却,必须接入过热保护
禁止将市电直接接入电机 U/V/W
禁止带电插拔连接器(操作器除外)
安装要求
项目 要求
安装方向 驱动器垂直安装
间距 上下≥50mm,左右≥10mm
环境温度 0–55℃,无冷凝、无粉尘
径向 / 轴向负载 按机型限定,不可超载
防护 室内使用,防油防水雾
接线核心
1. 主回路端子
L1/R、L2/S、L3/T:三相 400V 输入
U、V、W:输出接电机
B1/B2:外接制动电阻
DC24P/DC24N:控制电源
2. CN1(50 针 I/O 核心)
/S-ON(40 脚):伺服使能(低电平有效)
P-OT(42)/N-OT(43):正 / 反向超程禁止
/ALM-RST(44):报警复位
V-REF(5):速度模拟量给定
T-REF(9):转矩模拟量给定
PULS/SIGN(7/11):位置脉冲指令
ALM+/ALM-(31/32):报警输出
PAO/PBO(33/35):编码器分频输出
3. CN2:编码器接口
增量式:A/B/Z 信号
绝对式:电池备份(BAT+/BAT-),免回零
控制模式(Pn000.1 选择)
速度控制(0):模拟量 ±10V 给定
位置控制(1):脉冲串指令
转矩控制(2):模拟量转矩限幅
多段速控制(3–6):端子选择 3 段速度
模式切换(7–9/B):位置 / 速度 / 转矩切换
零钳位(A):停止时定位锁定
核心参数体系
1. Pn 参数(功能 / 增益 / 齿轮)
参数 功能 典型值
Pn000.1 控制模式选择 0/1/2
Pn100 速度环增益 40Hz
Pn102 位置环增益 —
Pn202/203 电子齿轮分子 / 分母 1–65535
Pn402/403 正 / 反向转矩限制 0–800%
Pn506 抱闸延时 0–50
2. Fn 辅助功能
Fn008:绝对值编码器清零
Fn013:多圈限位设置
JOG 运行、原点搜索
3. Un 监控
Un000:实际转速
Un005/006:I/O 状态、转矩监控
试运行流程(两步法)
Step1:空载试运行
脱开负载,检查接线
操作器 JOG 运行,确认转向、噪音、振动
Step2:带载试运行
连接负载
执行自动调谐
确认定位、响应、报警
关键功能
电子齿轮:任意脉冲当量,无需机械变速
绝对值编码器:断电记忆位置,开机免回零
抱闸控制:垂直轴防掉落,时序可设
转矩限制:保护机械,防止过载
自动调谐:自动识别负载惯量,优化增益
超程保护:P-OT/N-OT 硬限位
报警与维护
报警格式:A.xx(如 A.41 欠压、A.81 编码器电池)
报警输出:ALM 断开,ALO1–ALO3 输出故障码
易损件:编码器电池、风扇、制动电阻
维护:定期检查接线、散热、接地、螺丝扭力
关键问题
问题 1:SGDH 驱动器的三大控制模式是什么?分别用什么信号给定?
答案:
速度控制:由CN1-5 V-REF模拟量 ±10V 给定;
位置控制:由CN1-7/11 PULS/SIGN脉冲串给定;
转矩控制:由CN1-9 T-REF模拟量给定并限幅。
由参数Pn000.1切换模式。
问题 2:绝对值编码器的优势是什么?需要注意哪些接线与设置?
答案:
优势:断电保存位置,开机无需回零,提升效率。
接线:必须接 **CN1-21/22 BAT+/BAT-** 备份电池;
设置:Pn002.2=0启用绝对值,用Fn008清零多圈数据。
问题 3:伺服使能、超程、报警复位分别对应 CN1 哪个引脚?逻辑是什么?
答案:
伺服使能 /S-ON:CN1-40,低电平有效;
超程 P-OT/N-OT:CN1-42/43,高电平禁止运行;
报警复位 /ALM-RST:CN1-44,低电平复位。