欢迎浏览厦门控匠自动化科技有限公司


行业资讯
YASKAWA Σ-II Series SGMBH/SGDH 交流伺服系统
时间: 2026-03-28浏览次数:
YASKAWA Σ-II Series SGMBH/SGDH 交流伺服系统
YASKAWA Σ-II系列SGMBH/SGDH伺服驱动系统:技术详解与应用指南
系统概述与核心组件
Σ-II系列伺服驱动系统主要由SGMBH伺服电机和SGDH伺服驱动器(SERVOPACK)两部分构成,形成一个高性能的闭环控制系统。该系统专为400V电压等级、22kW至55kW的大功率应用而设计,满足工业现场对高动态响应和稳定性的严苛要求。
1. SGMBH伺服电机
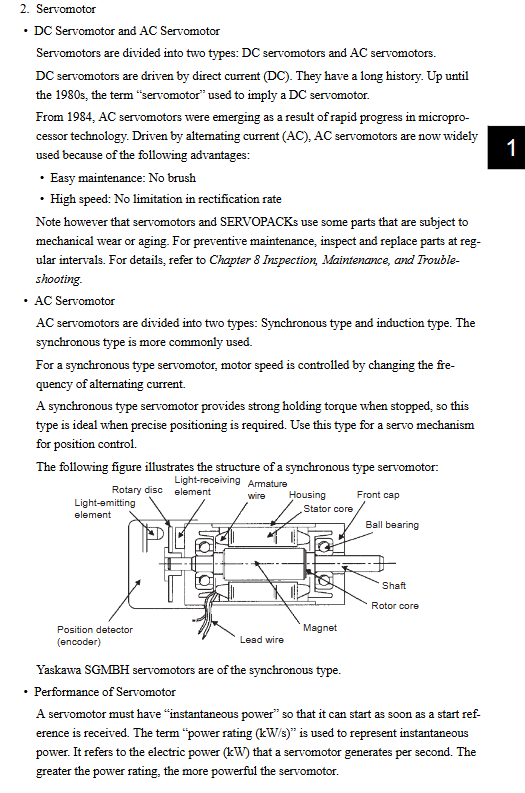
SGMBH电机是Σ-II系列中的同步型(永磁)伺服电机,具有以下显著特点:
高扭矩输出: 额定转速为1500 min⁻¹,最高转速可达2000 min⁻¹,并提供高达200%的瞬时峰值扭矩,确保设备在启动和加速时具备强大的动力。
多种容量选择: 提供从22kW到55kW共10个规格型号(如22kW、30kW、37kW、45kW、55kW),满足不同负载需求。
高精度反馈: 标配17位增量式编码器,并可选择17位或20位绝对值编码器,实现高精度的位置和速度检测。
坚固耐用: 采用全封闭、自冷却(带风扇)结构,防护等级IP44,适用于粉尘、油雾等较恶劣的工业环境。电机内置热保护器(Thermostat),用于监测电机温度,防止过热损坏。
2. SGDH伺服驱动器
SGDH驱动器是专门为SGMBH电机配套的伺服放大器,其核心功能是将来自上位控制器的指令(模拟量或脉冲)转换为驱动电机的三相交流电,并实现高精度的闭环控制。
多功能控制: 支持速度控制(模拟量参考)、位置控制(脉冲列参考)和扭矩控制(模拟量参考)三种基本模式,并可通过参数灵活切换多种复合控制模式。
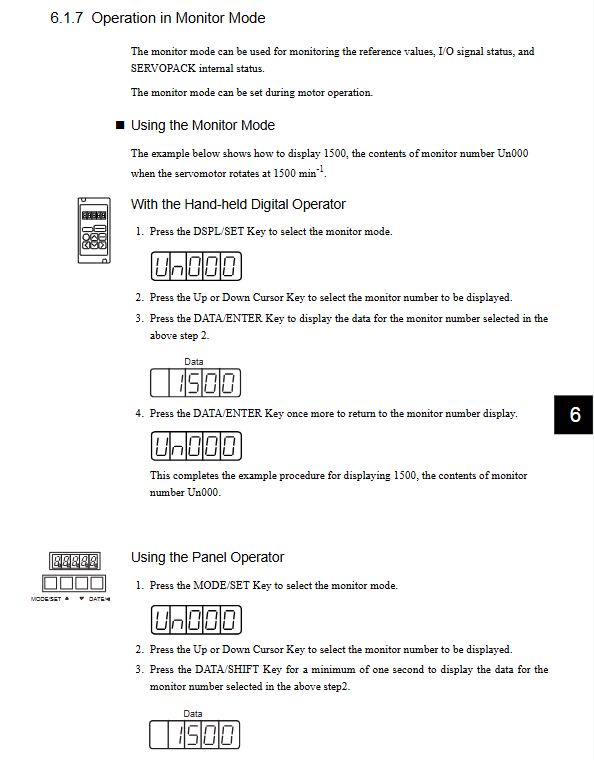
集成操作与监控: 内置面板操作器(Panel Operator),也可连接手持式数字操作器(JUSP-OP02A-2),用于参数设置、状态监控、试运行和故障诊断。
丰富的I/O接口: 通过CN1(50针)连接器提供与上位机交互所需的全部输入输出信号,包括伺服ON、报警、脉冲输入、模拟参考、编码器分频输出等。CN2连接器用于连接电机编码器。
系统集成与安装布线
正确的安装与布线是伺服系统稳定运行的基础。Σ-II系列产品在设计上充分考虑了工业现场的安装便利性和抗干扰能力。
1. 伺服电机安装
安装环境: 电机应安装在室内、无腐蚀性/易燃气体、通风良好、环境温度0~40°C、相对湿度20%~80%(无结露)的场所。对于有油雾或水分的环境,需加装防护罩并使用带油封的电机。
机械连接: 电机轴与负载轴需通过柔性联轴器进行高精度对中。安装前需清除轴端的防锈漆,避免直接冲击轴端,以防损坏内部编码器。电机允许的径向和轴向负载需严格遵循手册规定。
电气连接: 电机动力线(U、V、W)连接到驱动器的对应端子。电机内置的风扇(U(A)、V(B)、W(C))需连接三相380-480VAC电源,并确保风扇转向正确(风向从电机非负载端吹向负载端)。内置热保护器(1, 1b)必须接入控制电路,当电机过热时切断电源。
2. 伺服驱动器安装
安装方式: SGDH驱动器采用底座安装方式,必须垂直安装于控制柜内,以保证散热。
散热要求: 驱动器主要依靠自然对流或强制风冷散热。多台驱动器并排安装时,左右之间需留出至少10mm间隙,上下至少留出50mm间隙,并建议在顶部安装冷却风扇,确保环境温度不超过55°C。
主电路接线: 驱动器主电路输入端子(L1/R, L2/S, L3/T)连接三相380-480VAC电源。控制电路电源(DC24P, DC24N)需接入24VDC。电机输出端子(U, V, W)直接连接到伺服电机。再生电阻端子(B1, B2)可根据需要连接外部再生电阻单元。
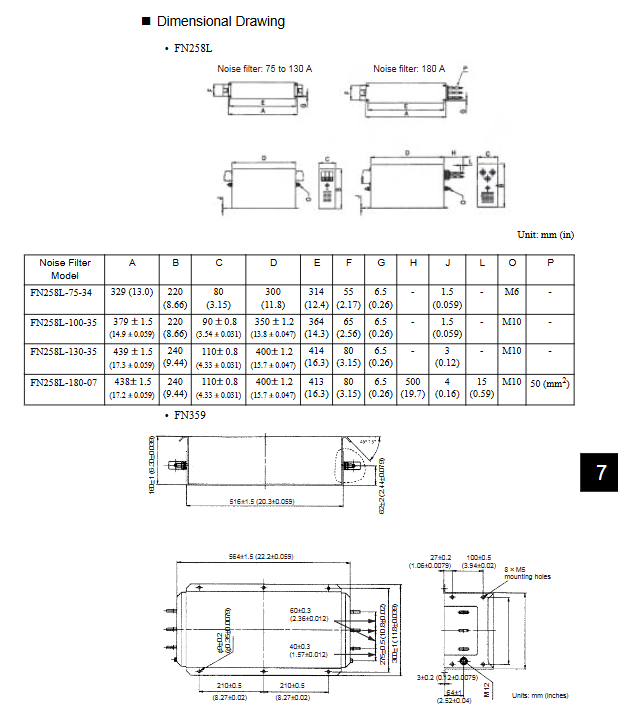
接地与抗干扰: 必须将驱动器的接地端子(⨁)和电机的接地端子(FG)可靠接地,接地电阻小于100Ω。信号线与动力线必须分开布线,间隔至少30cm。建议在输入电源侧安装噪声滤波器,并在继电器、接触器线圈上安装浪涌抑制器,以抑制电磁干扰。
核心功能与参数配置
SGDH驱动器的强大之处在于其高度可配置的内部控制算法和丰富的I/O功能,通过设置参数即可适应多样化的应用场景。
1. 控制模式选择
通过参数Pn000.1可以灵活选择控制模式,主要包括:
速度控制(0): 接收来自上位机的±6V至±10V模拟电压作为速度参考。驱动器内部完成速度闭环。
位置控制(1): 接收来自上位机的脉冲列(方向+脉冲、CW/CCW或90°相位差二相脉冲)作为位置指令。驱动器内部完成位置闭环和速度闭环。电子齿轮功能(Pn202, Pn203)可将输入脉冲转换为任意机械移动距离。
扭矩控制(2): 接收来自上位机的±1V至±10V模拟电压作为扭矩参考。此模式下,电机输出扭矩与输入电压成正比。
复合模式(3-9, A, B): 例如通过外部触点信号在速度/位置/扭矩模式间切换,或使用触点输入选择预设的内部速度进行控制。
2. 输入/输出信号配置
驱动器CN1连接器的输入信号(如伺服ON /S-ON、正向/反向超程禁止 P-OT/N-OT、报警复位 /ALM-RST、扭矩限制 /P-CL//N-CL)和输出信号(如伺服报警 ALM、定位完成 /COIN、速度一致 /V-CMP、旋转检测 /TGON、伺服准备 /S-RDY)均可通过参数(Pn50A-Pn50D, Pn50E-Pn512)进行重新分配和极性设置,极大提高了与不同上位机系统的兼容性。
3. 关键功能设置
电子齿轮: 通过设置Pn202(分子)和Pn203(分母),可以将输入脉冲数灵活转换为电机实际转角,简化了机械传动比的计算。
转矩限制: 通过参数Pn402/Pn403设置内部转矩限制,或通过外部触点(/P-CL//N-CL)和模拟电压输入(T-REF)实现动态转矩限制,有效保护机械负载。
超程保护(OT): 当P-OT或N-OT信号触发时,可通过参数Pn001.1设置停止方式(如动态制动停止、减速停止后伺服锁定、自由滑行停止),并可通过Pn406设置紧急停止扭矩。
绝对编码器功能: 当使用带绝对值编码器的电机时,需通过参数Pn002.2启用,并连接电池(BAT+, BAT-)。通过辅助功能Fn008可进行绝对编码器复位和设定,Fn013可修改多圈限制值。
调试与试运行
为确保系统安全、可靠地投入运行,必须遵循严格的试运行流程。
1. 试运行前准备
安全检查: 确认所有接线正确无误,特别是电源线、电机线和编码器线。
空载试运行(第一步): 关键步骤。必须断开电机与机械负载的连接(脱开联轴器),仅让电机空转。此阶段目的是验证电机、驱动器和编码器的基本功能。
使用数字操作器,通过JOG模式(Fn002)驱动电机,检查旋转方向和是否平稳。
检查输入信号状态(通过监控模式Un005),确认伺服ON、超程等信号有效。
检查无负载情况下电机运行是否正常,有无异响或异常振动。
2. 负载试运行与自动调谐(第二步)
连接负载: 在确认空载运行正常后,将电机与机械负载连接。
自动调谐(Fn001): SGDH驱动器内置了在线自动调谐功能。通过设置Pn110.0为“1”(连续调谐),驱动器会在实际运行中自动识别负载惯量,并相应调整速度环增益(Pn100)、积分时间常数(Pn101)、位置环增益(Pn102)和扭矩参考滤波器时间常数(Pn401),使系统达到最佳响应。用户只需通过Fn001选择机械的刚性等级(1-10级,数值越大刚性越高),自动调谐便会自动优化增益。对于负载变化不大的系统,可设定为只在首次运行时调谐。
保存调谐结果(Fn007): 将自动调谐计算出的负载惯量比(Pn103)保存至EEPROM,以便下次上电时直接使用,无需重新调谐。
高级调整与优化
对于追求极致性能的应用,可以通过手动调整伺服增益来优化系统响应。
基本增益调整原则: 伺服系统由内到外依次是电流环、速度环、位置环。内环的响应速度必须高于外环。因此,要提升位置环增益(Pn102),必须先提升速度环增益(Pn100)。如果位置环增益设置过高而速度环跟不上,会导致速度参考振荡,延长定位时间。
手动增益调整步骤:
首先,正确设置负载惯量比(Pn103)。这是准确设置速度环增益的前提。
逐步增加速度环增益(Pn100),直至机械系统开始发出轻微振动或噪音,然后稍微降低。设置速度环积分时间常数(Pn101),经验公式为 Pn101 ≈ 4 / (2π × Pn100)。
逐步增加位置环增益(Pn102),观察定位时间,直至定位响应令人满意且无过冲或振荡。
如果存在机械共振,可以调整扭矩参考滤波器时间常数(Pn401)或启用陷波滤波器(Pn408、Pn409)来消除特定频率的振动。
辅助优化功能:
前馈控制: 通过设置位置环前馈(Pn109)或速度前馈(Pn207.1),可以减小跟随误差,缩短定位时间。但前馈值过高可能导致超调。
模式切换(Mode Switch): 通过Pn10B设置,可以在加速或减速过程中,当扭矩、速度或加速度超过阈值时,将速度环从PI控制切换为P控制,以抑制超调和振荡,缩短整定时间。
速度偏置: 通过Pn107和Pn108设置,在位置控制时,当误差脉冲积累到一定程度时,自动附加一个速度偏置,以快速消除误差,缩短定位时间。
操作与监控
SGDH驱动器提供了多种方式进行操作和监控,方便现场调试和维护。
数字操作器(Digital Operator):
内置面板操作器: 位于驱动器前面板,通过按键和7段LED数码管,可以进行状态显示、参数设定、监控、报警复位等基本操作。
手持式数字操作器(JUSP-OP02A-2): 通过CN3接口连接,提供更丰富的功能和更友好的操作界面。除了基本功能外,还可进行JOG运行、零点搜索、报警跟踪、参数初始化等操作。
主要模式: 状态显示模式(Un000等)、参数设定模式(Pn000等)、监控模式(显示速度、转矩、输入/输出信号状态)、辅助功能模式(Fn000等,用于JOG、自动调谐、报警跟踪、绝对编码器设置等)。
监控功能:
实时监控: 监控模式(Un000-Un00D)可以实时显示电机实际转速、输入速度参考、内部扭矩参考、输入/输出信号状态、误差脉冲数等关键参数。
报警跟踪(Alarm Traceback): 驱动器可以记录最近10次发生的报警(Fn000),方便故障排查。
模拟监控(Analog Monitor): 通过CN5接口,可以输出两个模拟量信号(如速度、扭矩、位置误差),用于连接示波器等仪器,进行波形分析,便于高级调试。
维护与故障诊断
定期维护和有效的故障诊断是确保系统长期稳定运行的关键。
定期维护检查:
伺服电机: 日常检查振动、噪音、外观。定期(至少每年一次)检查绝缘电阻(应大于10MΩ)。对于带油封的电机,每运行5000小时建议更换油封。
伺服驱动器: 定期(至少每年一次)检查内部有无灰尘、螺丝有无松动。根据运行环境,按预定周期(如冷却风扇4-5年,电解电容7-8年)更换易损件。
故障诊断:
报警代码: 当系统出现故障时,驱动器前面板会显示“A.xx”格式的报警代码。手册详细列出了所有报警代码(如A.10过流、A.30再生错误、A.51超速、A.71/A.72过载、A.81编码器备份错误等)的含义、可能原因和处理对策。
无报警显示故障: 若电机不转、异常振动或速度不稳定但无报警显示,则需要检查电源、接线、输入信号状态、参数设置等。手册提供了详尽的故障排查表,按症状、原因和解决办法进行索引。
技术数据汇总
项目 SGMBH 伺服电机 SGDH 伺服驱动器
额定输出 22 kW - 55 kW 22 kW - 55 kW(与电机匹配)
额定转速 1500 min⁻¹ -
最高转速 2000 min⁻¹ -
额定扭矩 140 - 350 N·m -
电源电压 主电路:三相380-480VAC,±10% 主电路:三相380-480VAC,±10%
控制电源 - 24 VDC ±15%
反馈方式 17位增量/绝对值编码器(可选20位) 支持增量/绝对编码器
控制模式 - 速度/位置/扭矩控制及多种复合模式
环境温度 0 ~ 40°C 0 ~ 55°C
防护等级 IP44(全封闭,自冷却) 底座安装,IP20