欢迎浏览厦门控匠自动化科技有限公司


行业资讯
KUKA KR C2 edition2005 机器人控制器操作说明书
时间: 2026-03-18浏览次数:
KUKA KR C2 edition2005 机器人控制器操作说明书
KUKA KR C2 edition2005 机器人控制器操作说明书
KUKA KR C2 edition2005 机器人控制器操作说明书,涵盖产品描述、技术数据、安全规范、规划、运输、启动与调试、操作、维护、维修、故障排除及 KUKA 服务等核心内容,明确了控制器的目标用户为具备电气电子系统、机器人控制器及 Windows 系统高级知识的人员,核心功能是操控 KUKA 工业机器人、线性单元和定位器,强调需严格遵循安全规范与操作流程,避免人员伤害和设备损坏,同时提供了详细的部件信息、操作步骤及故障处理方案。
产品核心信息
组成结构
工业机器人:由manipulator(机械臂及电气装置)、机器人控制器、示教器(KCP)、连接电缆、软件、选配件组成
机器人控制器:包含控制 PC、电源单元、KCP、ESC 安全逻辑、KCP 耦合器(可选)、服务接口(可选)、连接面板
关键部件说明
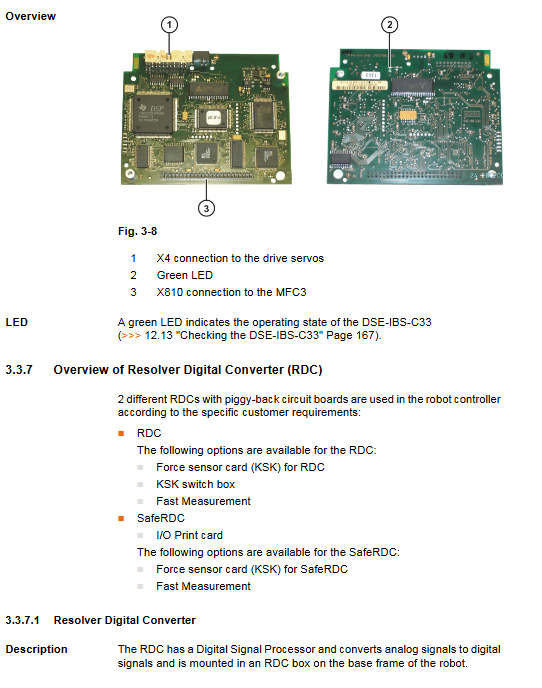
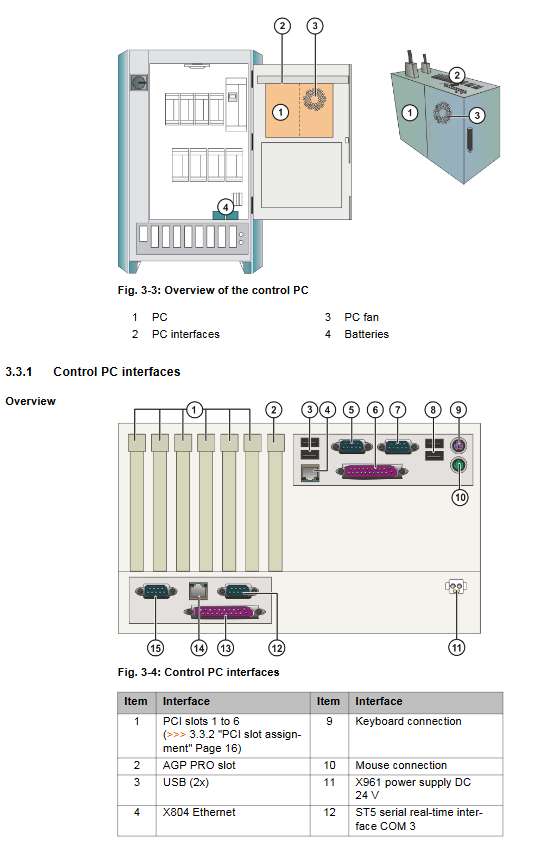
控制 PC:核心功能为程序创建、路径规划、驱动控制等,含主板、硬盘、MFC3、KVGA 等部件,支持多接口(USB、以太网、串口等)
电源单元:含 KPS600 电源、KPS-27 低压电源、KSD 伺服驱动器、保险丝、风扇等,提供 24V 等电压输出
ESC 安全逻辑:双回路计算机安全系统,监控急停、使能装置等,含 CI3 系列板卡(Standard/Extended/Bus/Tech)
KCP(示教器):含模式选择开关、急停按钮、使能开关等,防护等级 IP54(顶部)/IP23(底部),重量 1.4kg
技术数据
类别 关键参数
基础参数 最大轴数:8 轴;防护等级:IP54;平均声级:67 dB (A)
供电要求 额定电压:AC 3x400V-3x415V(公差 ±10%);频率:49-61Hz;额定功率:标准 7.3kVA,重载 13.5kVA
环境条件 运行温度:+5~+45℃(无冷却单元)/+5~+55℃(有冷却单元);存储温度:-25~+70℃(无电池);湿度:3k3 级(无冷凝)
尺寸与间隙 安装间隙:需遵守最小间隙要求(具体见文档图);柜门开启角度:独立柜体约 180°,并排柜体约 155°
电缆长度 电机电缆:标准 7m,可选 15/25/35/50m;KCP 电缆:标准 10m,可扩展至 60m
安全规范
核心原则
仅允许符合预期用途(操控 KUKA 工业机器人等),禁止人员 / 动物运输、攀爬、超参数运行等误用
需遵守 EC 机械指令(2006/42/EC)、EMC 指令(2004/108/EC)等标准
人员要求
操作人员需具备电气电子系统、机器人控制器、Windows 系统高级知识,建议参加 KUKA College 培训
系统集成商负责安装、风险评估、合规声明;维修需由专业培训人员执行
关键安全功能
操作模式:T1(手动低速≤250mm/s)、T2(手动高速)、AUT(自动)、AUT EXT(外部自动)
安全装置:本地 / 外部急停按钮、双回路使能开关、安全门联锁、软件限位开关、机械终端挡块
停止类别:STOP 0(立即停机)、STOP 1(路径保持停机)、STOP 2(正常减速停机)
场景安全措施
运输:控制器需直立运输,避免振动冲击;manipulator 需按规定运输位置摆放
启动:需检查接线、安全装置、温度适应,新程序需先在 T1 模式测试
维护 / 维修:需断电上锁、张贴警示标签,断电后需等待 5 分钟放电(部分部件残留 50-600V 电压)
操作与维护
启动与调试
核心步骤:安装控制器→连接电缆→连接 KCP→等电位连接→接电源→配置 X11 接口→开机→检查风扇转向→安全设备测试→软件配置
关键要求:需确保无冷凝、接线正确,避免电缆互换导致错误
日常操作
KCP 耦合器:支持运行中连接 / 断开,需按请求按钮操作,断开后需移除 KCP 避免误用
启动方式:支持从 KUKA USB 棒启动,需按 F10 选择启动项
维护周期与任务| 维护周期 | 任务内容 |
| 最长 2 年 | 清洁内外风扇、换热器、散热片;检查部件紧固性 |
| 2 年 | 更换电池 |
| 5 年 | 更换主板电池;3 班制运行需更换 PC 风扇 |
| 5 年 | 更换内外风扇 |
| 滤芯变色时 | 更换泄压塞滤芯 |
维修与故障排除
常见维修任务
部件更换:支持控制 PC、风扇、主板、内存、硬盘、CI3 板、RDC/SafeRDC 板、电池等更换,需遵守 ESD 规范
软件安装:可重新安装 KUKA System Software(KSS)
故障诊断
工具:DSE-RDW 诊断工具(监控 DSE-RDC 通信、驱动总线)、ESC 诊断工具(监控安全回路)
常见错误:控制 PC 启动故障、MFC3 初始化失败、总线通信错误、KCP 无显示等,提供错误原因与解决措施
错误代码:含 KPS600、KSD 等部件的错误代码含义与处理方案(如 Pr1-Trip 为参数集 1 校验和错误)