欢迎浏览厦门控匠自动化科技有限公司


行业资讯
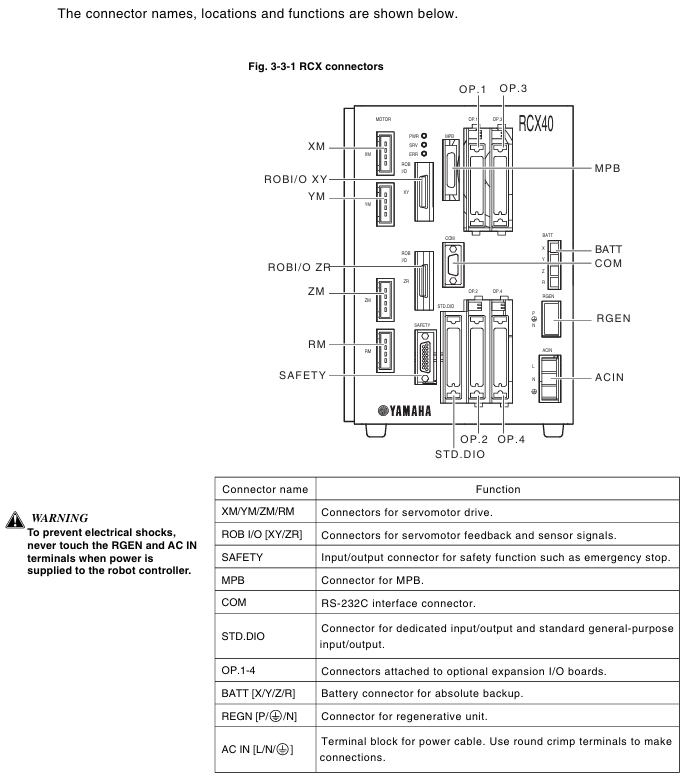
YAMAHA RCX40 4 轴机器人控制器
时间: 2025-11-08浏览次数:
YAMAHA RCX40 4 轴机器人控制器
YAMAHA RCX40 4 轴机器人控制器
核心安全规范
1. 安全等级定义
WARNING:违反可能导致人员重伤或死亡,涉及紧急停止、电源操作、爆炸环境使用等关键场景。
CAUTION:违反可能导致人员轻伤或设备损坏,涉及线缆布置、环境适配、部件操作等场景。
NOTE:明确操作关键要点,辅助正确使用设备。
2. 关键安全要求
系统设计需包含物理互锁电路,紧急停止端子需正确配置。
控制线缆与动力线缆需保持至少 100mm 间距,避免电磁干扰。
安装、接线前必须切断所有电源相,防止触电;接线后需安装端子盖再通电。
仅经过安全与操作培训的人员可操作机器人,运行时禁止人员进入运动范围。
控制器非防爆设计,禁止在易燃气体、汽油或溶剂环境中使用。
维护前需断电并等待至少 30 分钟,避免高温或高压部件造成伤害。
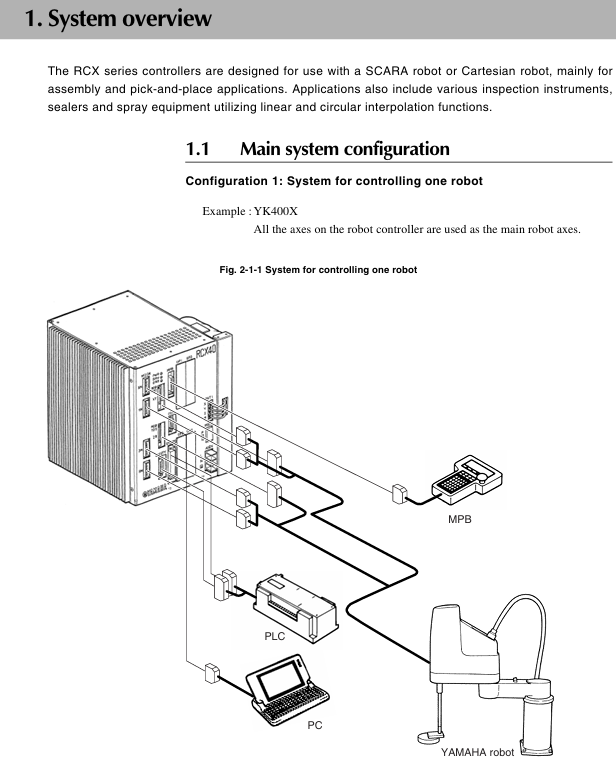
系统概述与核心功能
1. 系统配置
支持两种核心配置:单机器人控制、单机器人 + 辅助轴控制(最多 4 轴)。
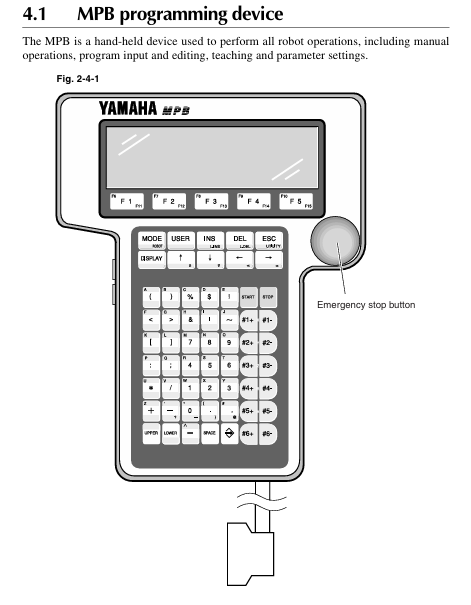
轴定义包含主机器人轴、主辅助轴、子机器人轴、子辅助轴,可通过 MPB 编程单元切换操作。
可选设备包括 MPB 编程器、扩展 I/O 板(最多 4 块)、再生单元,适配不同系统需求。
2. 核心功能亮点
多任务功能:最多同时运行 8 个任务,支持优先级设置,提升系统运行效率。
机器人语言:采用类 BASIC 的高级语言,符合工业机器人编程标准 SLIM,支持编译执行,编程高效。
运动控制:支持 Arch 运动(自由设定拾取放置路径)、三维 CP 控制(线性 / 圆弧插值运动),缩短循环时间。
维护便捷:软件伺服控制实现单元标准化,兼容多数 YAMAHA 机器人型号,简化维护调整。
合规性:符合机械指令、低电压指令及 EMC 指令,支持 SAFE 模式运行。
安装与接线规范
1. 安装要求
环境条件:运行温度 0-40℃,存储温度 - 10-65℃,湿度 35%-85%(无冷凝),避免振动、导电粉尘、腐蚀性气体环境。
安装空间:顶部、侧面至少预留 50mm 间隙,后部至少 30mm 间隙,确保散热通风。
安装方式:支持橡胶脚垫安装、前后面板 L 型支架安装、侧面 L 型支架安装四种方式。
2. 关键接线要点
电源连接:支持 AC200-230V 单相输入,需正确连接火线(L)、零线(N)和地线,电压波动需控制在 ±10% 以内。
线缆布置:机器人线缆需与动力线缆分离,避免缠绕;接线时需使用指定工具确保压接、焊接质量。
绝对电池连接:出厂时电池未连接,安装后需先连接电池再连接机器人线缆,电池需定期更换(约 1.5 年)。
紧急停止电路:需通过 SAFETY 接口正确连接紧急停止信号,确保触发时快速切断动力。
四、操作模式与核心操作
1. 主要操作模式
SERVICE 模式:仅 SAFE 模式下可用,用于安全围栏内维护,限制运行速度(≤3% 最大速度),禁止自动模式运行。
AUTO 模式:执行机器人程序,支持程序重置、任务切换、速度调整、断点设置等功能。
PROGRAM 模式:创建、编辑、管理机器人程序,支持程序复制、删除、重命名、编译等操作。
MANUAL 模式:手动移动机器人、进行点示教,支持绝对复位、坐标设置、手定义编辑等。
SYSTEM 模式:配置系统参数、通信参数、选项功能,支持数据初始化、备份与诊断。
UTILITY 模式:处理紧急停止取消、电机电源开关、执行级别调整等辅助功能。
2. 关键操作流程
绝对复位:原点丢失时需执行,支持单轴或全轴复位,复位前需确保轴处于安全位置。
程序执行:AUTO 模式下启动程序,可通过 STEP(单步执行)、SKIP(跳过当前行)、NEXT(执行子程序)调试。
点示教:MANUAL 模式下通过 Jog 键移动机器人到目标位置,执行 TEACH 命令保存点数据。
数据备份:通过 SYSTEM 模式将程序、参数、点数据等备份到内部闪存 ROM,避免数据丢失。
I/O 接口与通信
1. 标准 I/O 接口
包含 10 个专用输入、11 个专用输出、16 个通用输入、8 个通用输出,支持 NPN/PNP 规格。
专用输入包括伺服 ON、程序启动、自动模式切换、紧急停止等信号;专用输出包括 CPU 状态、伺服状态、报警、程序运行状态等信号。
2. 通信接口
支持 RS-232C 接口,可连接上位机进行数据通信,支持在线命令执行。
通信参数可配置:波特率(4800-57600bps)、数据位(7/8 位)、停止位(1/2 位)、校验位(NONE/ODD/EVEN)等。
维护与故障处理
1. 日常维护要点
定期检查绝对电池电压(正常 3.50-4.3V),低于 3.5V 需充电或更换。
定期备份程序与参数,避免硬件故障导致数据丢失。
检查线缆连接是否牢固,避免松动导致故障。
清理控制器散热风扇与散热片,确保散热良好。
2. 故障处理
通过 MPB 屏幕查看错误信息,参考 “故障排除” 章节定位问题。
常见错误包括原点丢失、电池电压低、程序语法错误、I/O 信号异常等,需针对性处理。
无法自行解决的故障需联系 YAMAHA 授权经销商或技术支持。