欢迎浏览厦门控匠自动化科技有限公司


行业资讯
Woodward 723 发电机控制器
时间: 2025-08-05浏览次数:
Woodward 723 发电机控制器
Woodward 723 发电机控制器
应用与概述
Woodward 723 发电机控制器适用于多种发电机应用场景,包括船舶系统中的辅助发电机和柴油电力推进,以及发电厂系统中的孤岛模式运行和对无限大电网的基本负荷运行。其具备闭环速度控制功能,配备扭转滤波器和陷波(带阻)滤波器,可缓解因发动机、发电机惯性及柔性联轴器导致的低频振荡问题。该控制器有三种运行模式,分别是基于 4-20mA 兆瓦传感器输入或执行器位置的下垂控制、带软加载 / 卸载且发动机卸载后自动发出发电机断路器打开指令的同步负载分配、带软加载 / 卸载且发动机卸载后自动发出发电机断路器打开指令的兆瓦控制。
硬件规格
型号与输出:型号包括 8280-500、8280-501、8280-502、8280-503,分别对应不同电压和输出类型,如 8280-500 为高压控制,执行器输出 0-200mA。
电源与功耗:电源供应有 18-40Vdc(标称 24 或 32Vdc)、90-150Vdc(标称 125Vdc),功耗标称 40W。
输入输出
速度信号输入:磁电传感器频率范围 400-15000Hz,接近开关 7.5-1000Hz。
数字输入:8 个,24Vdc 时 8mA。
模拟输入:4 个,4-20mA 或 1-5Vdc。
模拟输出:3 个,其中 2 个为 4-20mA 或 0-1mA(接仪表或计算机),1 个为 20-160mA 或 4-20mA。
执行器输出:1 个,20-160mA 或 4-20mA。
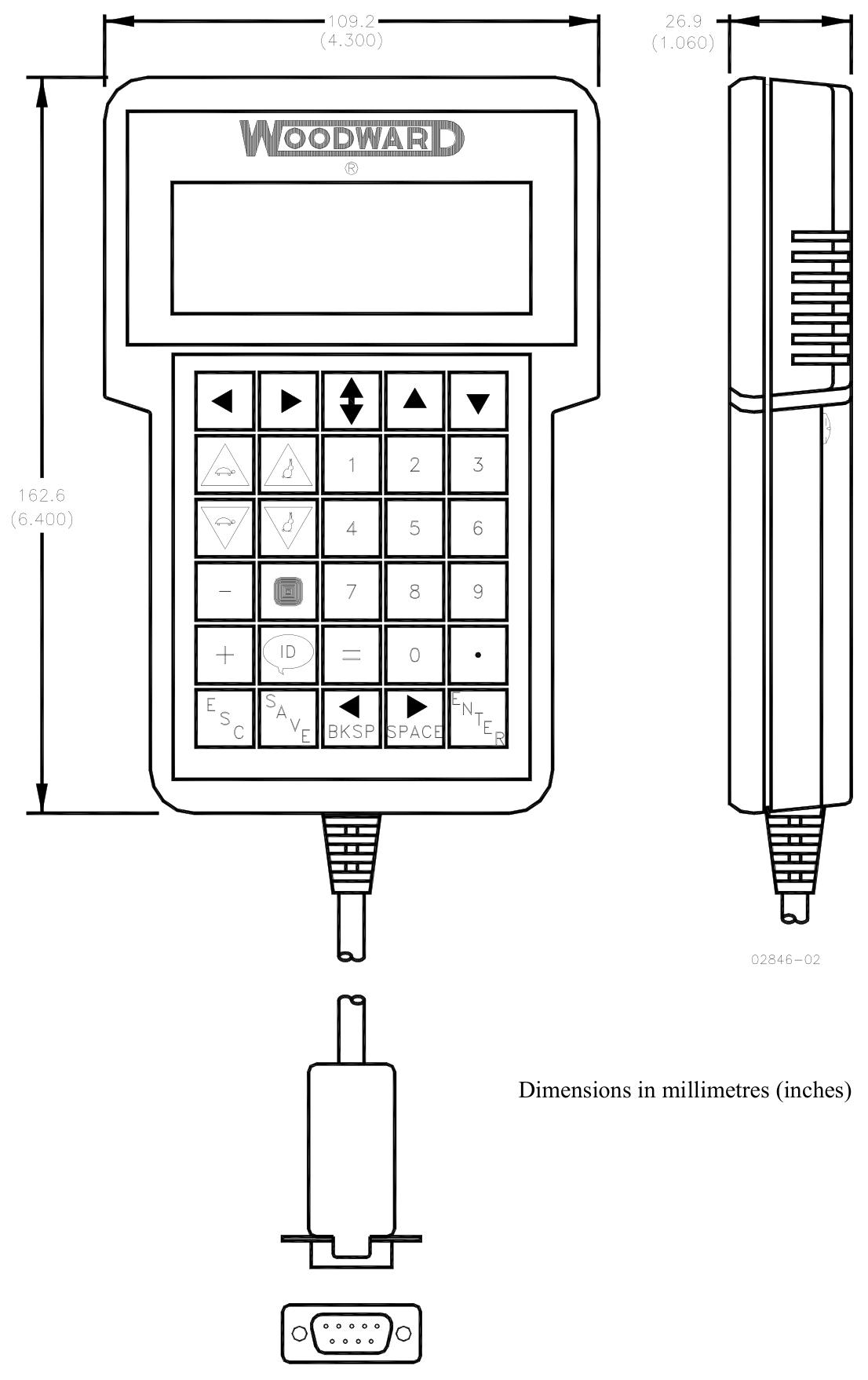
通信端口:编程器通信端口(J1)为 RS-422,9 针 D 型连接器,1200 波特率,全双工;通信端口(J2 和 J3)为 RS-232、RS-422 或 RS-485,9 针 D 型连接器,1200-38400 波特率,全双工。
环境参数:工作环境温度 - 40 至 + 70°C(-40 至 + 158°F),存储温度 - 55 至 + 105°C(-67 至 + 221°F),湿度在 38°C 时为 95%,抗电磁干扰 / 射频干扰符合美国 MIL-STD 461C(第 5 和 9 部分),湿度符合美国 MIL-STD 810D 方法 507.2 程序 III,机械振动为 24-2000Hz 扫频正弦波,2.5Gs 恒定加速度,共振停留 - 100 万次循环,每轴总时间 3/4-6 小时,机械冲击符合美国 MIL-STD 810C 方法 526.2 程序 I(基本设计测试)、程序 II(运输跌落测试,包装)、程序 V(工作台操作),盐雾符合 ASTM B 117-73。
安装要点
开箱与检查:安装前需阅读静电放电防护相关内容,开箱时小心处理电子控制器,检查是否有损坏,若有损坏立即通知托运人。
电源要求:高压版本需 90-150Vdc 电压源,低压版本需 18-40Vdc 电压源,两者最大功耗均为 40W,且不要超过输入电压范围,若使用电池供电,需配备交流发电机或其他电池充电设备。
位置选择:安装位置需考虑通风、维修空间、防湿、远离电磁干扰源、避免振动,工作温度范围为 - 40 至 + 70°C(-40 至 + 158°F),且不能安装在发动机上。
电气连接:所有屏蔽电缆必须是双绞线对,不要尝试镀锡编织屏蔽层,所有信号线应屏蔽,将屏蔽层连接到最近的底盘接地,屏蔽层外的电线暴露长度应尽可能短,不超过 50mm(2 英寸),屏蔽层另一端必须开路且与任何其他导体绝缘,不要将屏蔽信号线与载有大电流的其他电线一起布设。
系统功能
发动机速度相关功能
速度传感:控制器有两个速度传感输入,可配置为扭转滤波(使运行更平稳,适用于柔性联轴器)或高信号选择(实现速度传感冗余,当一个信号故障时启用)。若使用扭转滤波器,速度传感器应分别位于联轴器两侧;若使用高信号选择,两个速度传感设备应位于同一测速盘上。速度传感器 #2 还可配置为检测涡轮增压器速度。
速度滤波:每个速度传感器输入都有低通滤波器,可过滤速度传感器上的不良频率,若调谐到 15.9Hz 以上,滤波器将自动禁用。此外,还可启用陷波滤波器,其滤波频率应设置为需要滤波的速度信号的共振频率,滤波 Q 因子可调整被带阻滤波器滤波的信号频率的衰减程度。
速度控制:包括怠速速度、额定速度设置,超速跳闸功能(达到设定速度时启动停机,防止超速),以及速度参考的最小、最大限制和加减速速率控制等。
同步与负载控制功能
发动机启动:当 Run/Stop 触点闭合(或按配置为打开时),速度参考处于怠速,当发动机速度超过怠速 / 额定切换速度时,速度参考将以加减速速率 ramp 至额定速度,此过程可通过暂时闭合减速触点中断。若启用怠速 / 额定选择功能,发动机启动后,根据触点位置决定保持怠速或 ramp 至额定速度。
同步功能:当发动机达到额定速度且在同步就绪限制内保持同步就绪延迟时间后,“准备同步” 状态通过 Modbus® 传达为 TRUE。可通过单元同步器输入或增减触点调整速度参考以实现与母线同步,也可在发电机断路器辅助触点闭合后,通过系统同步器输入偏置速度参考,实现跨母线联络线或与电网同步。
下垂控制:当同步 / 下垂触点打开且发电机断路器辅助触点闭合时,以下垂模式运行。基于下垂百分比和发动机负载计算速度下垂值,发动机负载来自兆瓦传感器输入,若该信号故障则基于执行器输出位置确定,同时提供 “下垂脉冲” 功能防止发动机在下垂模式下连接到母线时陷入反向功率。
同步负载分配:闭合同步 / 下垂触点,且发电机断路器辅助触点闭合、负载输入信号正常时,启用同步负载分配。第一台联机机器立即闭合其负载共享线路上的继电器 K4 触点,后续被选为同步的机组将根据自动加载 / 卸载速率软增减负载,直至与已同步负载共享的机组负载在规定的负载共享误差范围内,此时继电器 K4 闭合以连接负载共享线路,实现负载均衡。还具备自动软卸载功能,闭合卸载触点(瞬时)时,发动机负载以自动卸载速率下降至卸载跳闸水平,随后发出发电机断路器打开指令。
兆瓦控制:当发电机断路器辅助触点、并网触点(若使用)和兆瓦控制触点输入闭合,且兆瓦负载输入未禁用时,以兆瓦控制模式运行。可通过增减触点调整兆瓦参考值,也可根据内部兆瓦参考或远程参考(4-20mA 或 Modbus®)调整。若远程参考输入故障,兆瓦参考将锁定最后一个健康值。
保护与限制功能
高 / 低频保护:在兆瓦控制模式下,可配置为在电网频率过高或过低时打开电网和 / 或发电机断路器,或切换到下垂模式(兆瓦覆盖功能)。
限制器功能:包括启动和最大燃油限制器(限制发动机启动时的过度供油或 flooding)、发动机停机限制器、频率负载限制器(在兆瓦控制期间,电网频率超出预设限制时限制发动机负载)、增压空气压力限制器(基于 4-20mA 增压空气压力输入信号提供燃油限制)等。
负载 rejection 功能:当发电机断路器或电网断路器打开且负载高于一定水平时,负载 rejection 算法生效,将执行器输出驱动至零一段时间,减少速度超调。
