欢迎浏览厦门控匠自动化科技有限公司


行业资讯
ABB NextMove ESB-2 运动控制器
时间: 2025-07-28浏览次数:
ABB NextMove ESB-2 运动控制器
ABB NextMove ESB-2 运动控制器
产品定位:NextMove ESB-2 是一款高精度多轴智能控制器,支持伺服电机和步进电机控制,适用于自动化生产线、精密机械等场景,通过 Mint 编程语言实现复杂运动控制(如点位运动、电子齿轮、凸轮同步等)。
产品概述与核心特性
1. 型号与分类
根据伺服轴数量、串行接口类型和步进输出类型分为 8 种型号,核心差异如下:
型号系列、伺服轴数量、步进轴数量、额外编码器输入、串行端口、步进输出类型
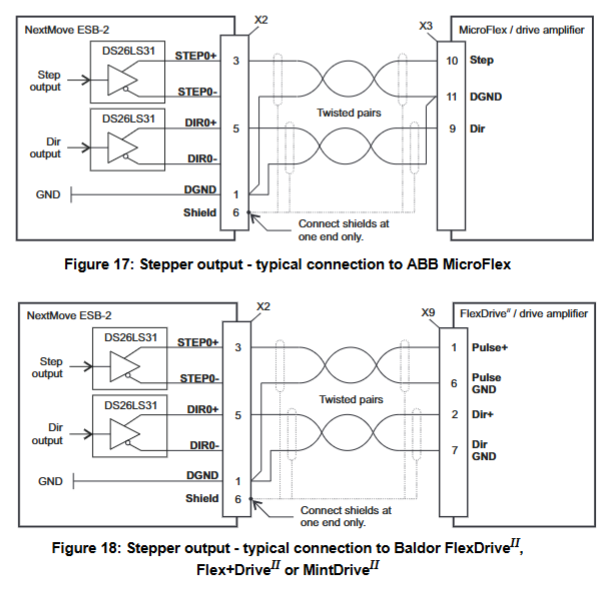
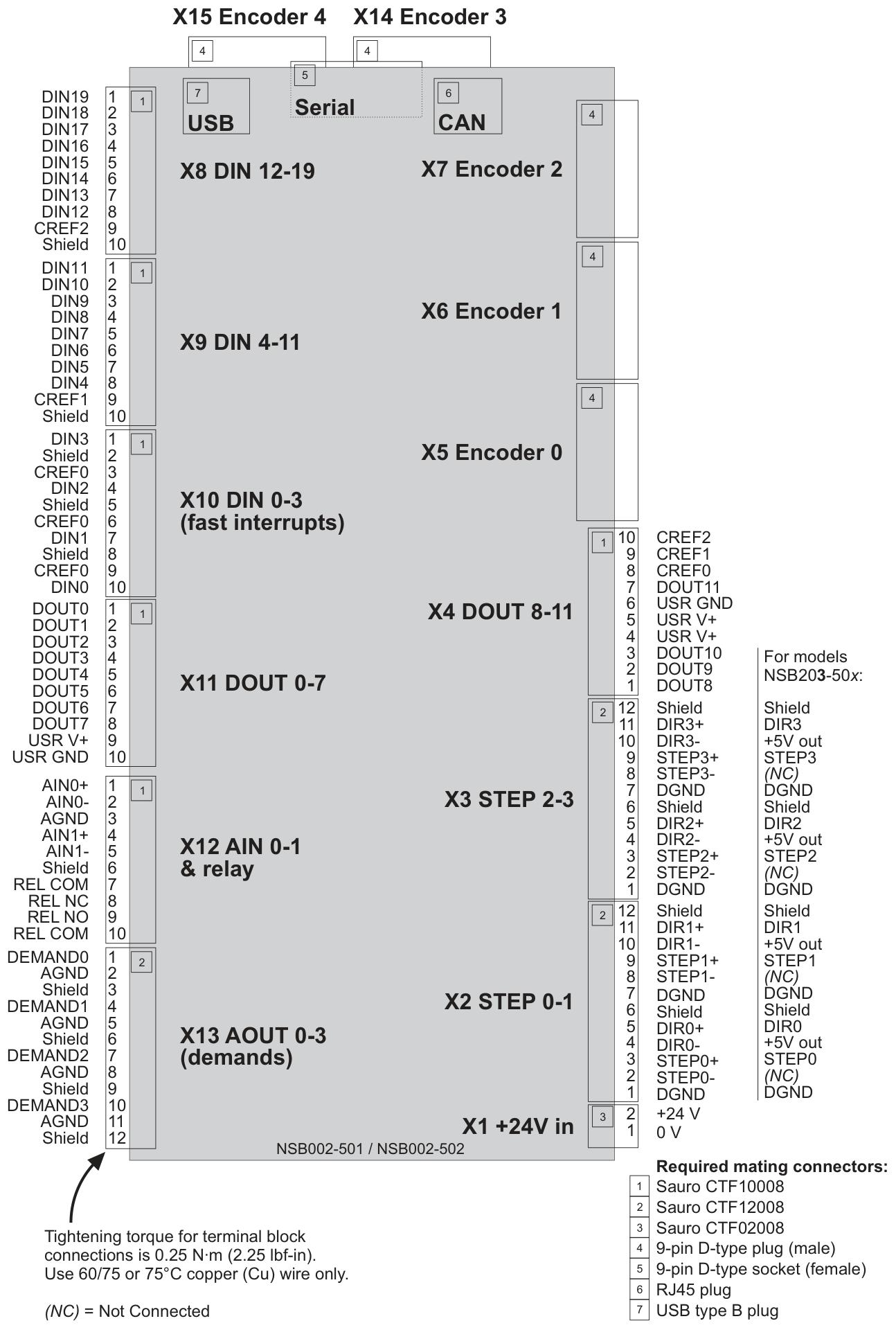
NSB202、3、4、2、RS232/485、差分输出
NSB203、3、4、2、RS232/485、开集电极输出
NSB204、4、4、1、RS232/485、差分输出
NSB205、4、4、1、RS232/485、开集电极输出
2. 核心功能
多轴控制:支持 4 路步进轴 + 3/4 路伺服轴(型号 dependent),支持主从跟随、电子齿轮等复杂运动模式。
丰富 I/O 接口:20 路数字输入、12 路数字输出、2 路 12 位模拟输入、4 路 12 位模拟输出,适配多种传感器和执行器。
通信能力:标配 USB 1.1、RS232/RS485、CANopen(兼容第三方设备)及 Baldor CAN(专有协议)。
编程灵活性:基于 Mint 语言(结构化 Basic),支持快速开发简单运动程序及复杂同步控制逻辑。
硬件与接口配置
1. 电源与安装
供电要求:+24V DC(±20%),持续电流 2A,建议配置 4A 保险丝的独立电源。
安装环境:工作温度 0~45℃,相对湿度≤80%(无凝露),需垂直安装在非易燃表面,周围预留≥20mm 散热空间。
机械尺寸:245mm×140mm×45mm,重量约 700g,通过 M4 螺丝固定。
2. 关键接口参数
模拟输入:差分输入,±10V 量程,12 位分辨率,输入阻抗 120kΩ,最高采样率 4kHz
模拟输出:单端输出,±10V 量程,12 位分辨率,最大输出电流 2.5mA,更新频率最高 10kHz
数字输入:光耦隔离,支持电平 / 边沿触发,共 3 组公共端(CREF0/1/2),输入电压 12~30V DC
数字输出:最大总电流 500mA(DOUT0-7)/500mA(DOUT8-11),支持驱动继电器、电磁阀等
编码器输入:支持 5 路增量编码器(A/B/Z 相),RS422 差分信号,最高输入频率 10MHz
CAN 接口:支持 CANopen 和 Baldor CAN 协议,波特率最高 1Mbps,需 12-24V 供电(光耦隔离)
串行接口:RS232(最高 115.2Kbaud)/RS485(支持多机级联),USB 1.1(兼容 USB 2.0/3.0)
软件与编程指南
开发环境与工具
1. 核心软件组件
Mint WorkBench:集成开发环境(IDE),用于程序编写、调试、参数配置及运动监控,支持 Windows XP 及以上系统(32/64 位)。主要功能包括:
代码编辑与语法检查
实时数据采集与图形化显示(位置、速度、电流等)
轴参数配置与伺服调谐
固件更新与系统诊断
Mint Machine Center (MMC):用于管理多控制器网络,支持扫描、连接多个 NextMove ESB-2 节点,可创建可视化系统布局并保存工作区配置。
2. 软件安装与连接
安装要求:PC 需满足最低配置(1GHz 处理器、512MB 内存、2GB 硬盘空间、USB 或串口),管理员权限方可安装。
连接方式:
USB:通过 USB Type B 接口直接连接,自动安装驱动(Windows XP/Vista/7 兼容)。
串口:RS232(最大 3m 电缆)或 RS485(支持多机级联,需终端电阻匹配)。
网络:通过 CANopen 或 Baldor CAN 协议连接分布式节点。
Mint 编程语言基础
语言特性
Mint 是专为运动控制设计的结构化语言,基于 Basic 语法,扩展了运动控制专用命令,特点包括:
多轴支持:通过轴编号(0-7)区分控制对象,支持同时操作多个轴。
实时性:循环周期可配置(1ms 或 2ms),确保运动指令高效执行。
丰富库函数:涵盖点位运动、速度控制、同步跟随等专用命令
