欢迎浏览厦门控匠自动化科技有限公司


行业资讯
ABB NextMove ESB-2 运动控制器
时间: 2026-05-20浏览次数:
ABB NextMove ESB-2 运动控制器
ABB NextMove ESB-2 运动控制器
ABB NextMove ESB-2多轴运动控制器的官方用户手册,该控制器基于Mint编程语言,支持最多 4 轴伺服 + 4 轴步进控制,标配2 路 12 位差分模拟量输入、4 路 12 位模拟量输出、20 路光隔数字输入、12 路数字输出、1 路继电器、5 路差分编码器接口、USB/RS232/RS485/CAN通讯,通过Mint WorkBench实现轴配置、伺服整定、运动编程与故障诊断,适用于高精度点位、插补、电子凸轮 / 齿轮、飞剪等工业运动控制场景,满足CE、UL、RoHS认证。
产品定位与核心规格
基础参数
参数 规格
控制轴数 4 轴伺服 + 4 轴步进
供电 24VDC±20%,最大2A/50W
工作温度 0~45℃
尺寸 245×140×45mm
重量 700g
认证 CE、UL、RoHS、WEEE
型号区分(NSB202/203/204/205)
NSB202/204:步进输出为差分 RS422
NSB203/205:步进输出为开集电极
串口版本:RS232 / RS485 可选
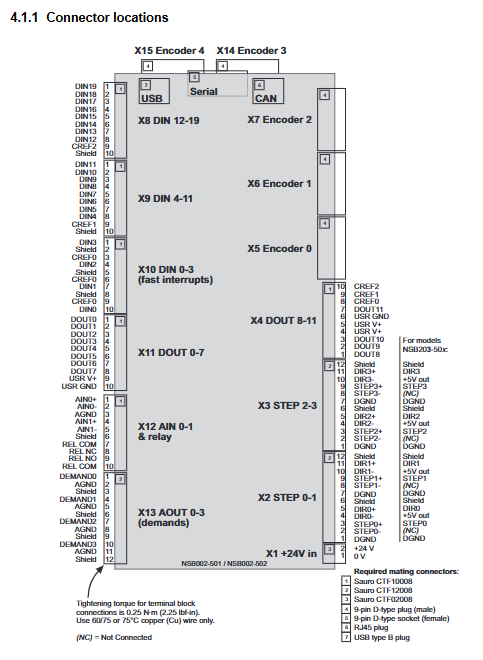
I/O 接口资源
1. 模拟量 I/O
输入:2 路差分,±10V,12 位,输入阻抗120kΩ
输出:4 路双极性,±10V,12 位,最大2.5mA / 路
2. 数字量 I/O
输入:20 路光隔离,24VDC,可设电平 / 边沿触发
DIN0~3:高速中断输入,响应1μs
DIN17~19:可作为辅助编码器输入
输出:12 路,总电流 **≤500mA**,单路最大350mA
继电器:1A@24VDC,故障安全常闭输出
3. 编码器与运动接口
编码器:5 路差分 ENC0~4,支持A/B/Z,最高2.5MHz
步进输出:4 轴,最高500kHz脉冲频率
4. 通讯接口
USB 1.1:编程调试,最大5m
RS232/RS485:波特率9600~115200bps
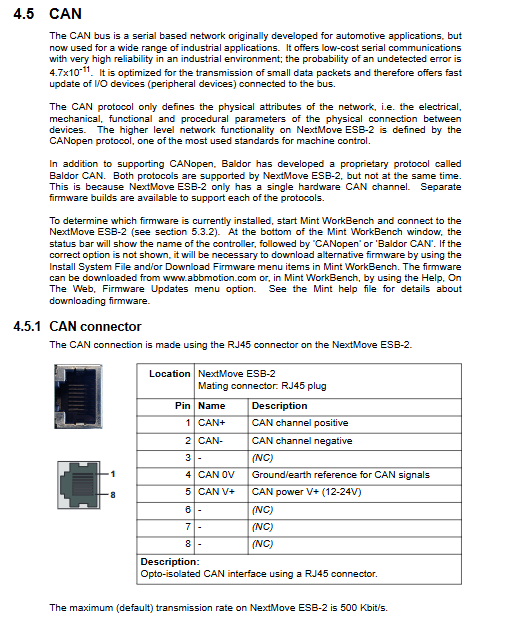
CAN:RJ45接口,支持CANopen / Baldor CAN,波特率10k~1Mbps
软件与编程
开发环境
Mint WorkBench:轴配置、参数整定、编程调试
Mint Machine Center (MMC):网络扫描、多机管理
编程语言
Mint:类 BASIC 结构化运动语言,支持点位、插补、凸轮、飞剪
关键功能
电子凸轮 / 齿轮、圆弧 / 螺旋插补、多轴同步、位置比较输出
轴配置与伺服整定
1. 轴配置流程
选择轴类型:伺服 / 步进 / 虚拟
设置SCALEFACTOR:脉冲→用户单位(mm/°)
配置驱动器使能(IO / 继电器)
保存配置到启动块
2. 伺服环路增益(核心)
KPROP:比例增益,提高响应速度
KDERIV:微分增益,抑制振动
KINT:积分增益,消除稳态误差
KVELFF:速度前馈,减小跟随误差
3. 整定目标
临界阻尼:快速到位、无超调、无振荡
安装与接线规范
安装:垂直安装,四周留 **≥20mm** 散热空间
接地:单点接地,屏蔽线单端接地
编码器:双绞屏蔽线,最长30.5m
CAN 总线:两端120Ω终端电阻,波特率全网一致
故障诊断
状态显示:7 段数码管显示节点号 / 错误码
常见故障
通讯失败:检查 USB / 串口驱动、接线、地址
电机不转:确认驱动器使能、接线、增益
振动 / 超调:降低 KPROP、增加 KDERIV
跟随误差:增大 KPROP/KVELFF、检查编码器
工具:SupportMe 信息收集、错误日志、示波器
关键问题
问题 1:NextMove ESB-2 的伺服与步进轴分别支持多少路?模拟量与编码器接口的核心参数是什么?
答案:
运动轴:支持最多 4 轴伺服 + 4 轴步进;
模拟量:2 路 12 位差分输入(±10V)、4 路 12 位双极性输出(±10V);
编码器:5 路差分 RS422 接口,最高输入频率2.5MHz,最大布线长度30.5 米。
问题 2:伺服轴整定中 KPROP、KDERIV、KINT、KVELFF 分别起什么作用?如何快速获得稳定响应?
答案:
KPROP:提升响应速度,过大会振动;
KDERIV:阻尼抑制超调,过大反应变慢;
KINT:消除静止误差,过大会振荡;
KVELFF:速度前馈,降低匀速段跟随误差。
快速整定:先调 KDERIV 防振,再升 KPROP 至刚不振,少量加 KINT 消差,最后优化 KVELFF。
问题 3:DIN0~3 与普通数字输入有何区别?DIN17~19 可额外实现什么功能?
答案:
DIN0~3 是高速硬件中断输入,位置锁存响应1μs,不可直接接机械开关;
DIN17~19 可配置为辅助编码器输入,支持脉冲 + 方向信号,最高15kHz,用于外部主轴 / 主轴跟随。