欢迎浏览厦门控匠自动化科技有限公司


行业资讯
YASKAWA DX200 机器人功能包手册
时间: 2026-05-19浏览次数:
YASKAWA DX200 机器人功能包手册
YASKAWA DX200 机器人功能包手册
YASKAWA DX200机器人控制器2018 版功能包与单功能说明书,覆盖标准 / 扩展 / 弧焊 / 点焊 / 喷涂 / 码垛 / 视觉 / 安全等全场景功能,提供多任务独立控制、协调运动、以太网高速通信、自动备份、AI 自动调谐等核心能力,支持8 台机器人协同、16 任务并行,搭配MotoLogix、PalletSolver、MotoFit等专用软件包,满足汽车、焊接、搬运、装配、喷涂全行业应用,所有功能均标注SAP 编号与权限依赖。
系统架构与能力
控制能力
最多支持 8 台机器人 + 多个外部轴 / 站点
独立任务:最多 16 个任务并行(可选扩展)
协调运动:双机 / 三机 / 四机同步控制
通信接口(标配)
Ethernet 10/100Mbps、RS-232
协议:FTP、HTTP、High Speed Ethernet Server
上位机:MotoLogix、MotoCom SDK
功能包分类(核心)
1. 标准功能包(Standard Setting)
SAP 编号 功能名称 核心作用
163897 Relative Job 相对程序 坐标系偏移、整程序平移
163902 独立控制(多任务) 最多 8/16 任务并行
163926 宏指令 自定义指令、参数传递
163928 自动备份 CF 卡 / RAM 循环备份
164062 高速以太网服务器 高速 PC/PLC 通信
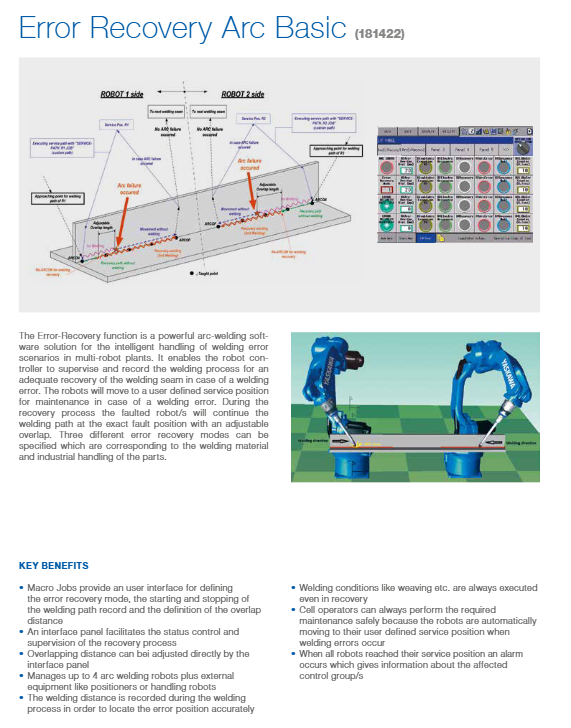
2. 弧焊专用包(ARC-Weld)
等级 SAP 覆盖功能
Basic 163970 搜索、点修正、摆动
Advanced 163971 Comarc、多层焊
Expert 163973 全功能电弧跟踪、自适应
3. 点焊专用包
焊枪自动切换(175076)
多段压力控制(175078)
点焊质量监控(175079)
4. 应用专用包
MotoLogix(176052):PLC 直接控制机器人
PalletSolver(175399):自动码垛规划
MotoFit(175396):6 轴力控精密装配
MotoEyeLT:激光焊缝跟踪
5. 安全功能包
STO(171987):安全扭矩关闭,PLd
立方体干涉检查(163945)
多机器人臂干涉检查(163951)
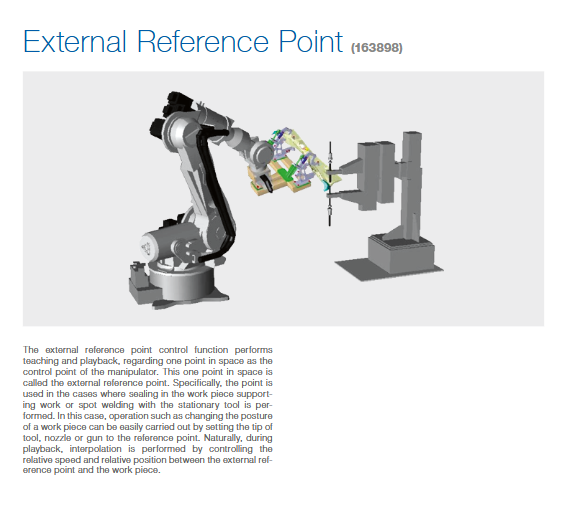
核心高级功能
运动控制
Link/Linear Servo Float:力控浮动、贴合加工
传送带同步:单 / 多机追踪工件
T 轴无限旋转:突破 ±360° 限制
编程与调试
结构化语言:IF/SWITCH/FOR/WHILE
运行中编辑程序(163938)
示教器示波器(163952)
数据与诊断
报警详情显示(163944)
操作日志(163937):200 条记录
FTP 远程备份(163947)
关键规格数字
项目 数值
最大受控机器人 8 台
最大并行任务 16 个
以太网速度 10/100Mbps
日志记录数 200 条
干涉检查区域 8 个立方体
安全等级 PLd / Cat.3
宏名称长度 16 字符
关键问题
问题 1:DX200 的独立控制(多任务)与协调运动有什么区别?分别用于什么场景?
答案:
独立控制:多台机器人 / 站点分别执行不同程序,互不干涉,适合 “一焊一搬” 双机作业。
协调运动:多机 / 站点同步插补运动,路径联动,适合无夹具焊接、双机抬举工件。
问题 2:MotoLogix功能的核心价值是什么?相比传统机器人编程有何优势?
答案:
MotoLogix 允许PLC 直接控制机器人,运动规划仍由 DX200 完成。
优势:
设备厂商无需学习机器人语言
整线逻辑统一在 PLC 中
虚拟调试、HMI 直接管控机器人
问题 3:DX200 的 ** 相对程序(Relative Job)** 功能解决什么现场问题?
答案:
将脉冲型程序转为坐标系程序,支持整程序批量偏移,解决工装移位、生产线换型、多工位复用程序的问题,无需重新示教全部点位。