欢迎浏览厦门控匠自动化科技有限公司


新闻资讯
Beckhoff EL70x7 系列步进电机 EtherCAT 端子手册
时间: 2026-06-09浏览次数:
Beckhoff EL70x7 系列步进电机 EtherCAT 端子手册
Beckhoff EL70x7 系列步进电机 EtherCAT 端子手册
产品概述(EL7037 & EL7047)
EL70x7 包含两款核心型号,均为单通道步进电机 EtherCAT 运动端子,支持矢量控制、增量编码器、64 细分微步,区分电压、电流与功率等级。
1. 核心参数对比
参数项 EL7037 EL7047
额定供电 24VDC(-15%/+20%) 8~48VDC
输出电流(无风扇) 1.5A 5A
输出电流(配 ZB8610 风扇) 3.0A 6.5A
应用定位 小功率步进电机 中功率步进电机
尺寸 15mm×100mm×70mm(安装宽 12mm) 27mm×100mm×70mm(安装宽 24mm)
重量 约 60g 约 105g
E-Bus 功耗 典型 100mA 典型 140mA
编码器最大脉冲 400k 脉冲 / 秒(4 倍频) 400k 脉冲 / 秒(4 倍频)
步频可选 1000/2000/4000/8000/16000 整步 / 秒 同左
微步 最高 64 倍(随转速自动切换) 最高 64 倍
电气隔离 500V(E-Bus 与信号侧) 500V
工作温度 0℃~+55℃,存储 - 25℃~+85℃ 同左
防护等级 IP20 IP20
认证 CE、EAC、UKCA、cULus 同左
2. 通用硬件配置
接口:2 路限位数字输入、1 路可配置刹车输出(0.5A)、增量编码器接口(A/B/Z 相 + 锁存);
驱动特性:电流环频率约 30kHz,输出具备过载、短路、过温保护;
接线方式:免螺丝弹簧端子,适配 0.08~2.5mm² 线缆;
指示灯:电源、运行、编码器、电机相故障、报警、使能、转向等状态 LED,直观诊断。
核心控制技术原理
EL70x7 提供三大控制模式,适配不同电机与应用场景,核心围绕步进电机驱动优化。
1. 步进电机基础
设备适配两相混合式步进电机(工业主流),电机参数(步角、电感、反电动势、转动惯量、齿槽转矩)直接影响运行稳定性。文档给出电机选型、参数测算、负载匹配的完整流程。
2. 三大工作模式
(1)标准模式(通用型)
适配:所有两相步进电机(第三方 / 倍福电机均可);
原理:正弦 / 余弦电流驱动,最高 64 细分微步,传统步进驱动架构;
特点:动态性能优秀,成本低;缺点是低速易谐振、空载易失步。
(2)磁场定向控制(扩展模式)
限制:仅支持倍福 AS10xx 系列步进电机,需搭配增量编码器(最低 4000 脉冲 / 转);
原理:通过派克变换解耦励磁与转矩电流,将步进电机等效为伺服电机;
优势:彻底消除谐振、杜绝失步、负载自适应降流、功耗与发热大幅降低,动态接近伺服;
前置要求:上电需执行换相校准(电机小幅正反转)。
(3)无传感器模式
限制:仅支持倍福 AS10xx 电机,无需编码器;
原理:通过检测电机反电动势估算转速与负载,实现负载自适应控流;
运行规则:低速自动切换为标准模式,达到设定切换转速后启用无传感器控制;
特点:省去编码器成本,能效高;缺点是动态性能略有下降,切换瞬间存在轻微机械抖动。
3. 辅助功能
微步:最高 64 倍细分,自动随转速切换,提升定位精度与运行平顺性;
负载角检测、失步检测:可通过编码器 / 反电动势实现故障诊断;
扭矩降载:静止时自动降低电机电流,减少发热。
EtherCAT 通讯基础
1. 硬件布线要求
线缆:使用 Cat5 及以上网线,设备间最大线缆长度100m,采用 RJ45 接口;
接线:仅使用网线 4 根信号线,支持直连 / 交叉线(自动识别);
E-Bus 总线:总线耦合器最大输出 2A 电流,电流不足时需加装 EL9410 等馈电端子,所有端子需共地。
2. 看门狗(Watchdog)
设备配备SM 同步管理器看门狗和PDI 过程数据看门狗(默认 100ms),通讯中断时自动将输出置安全状态,可在 TwinCAT 中配置超时时间。
3. EtherCAT 状态机
标准 5 种运行状态,上电依次切换:
Init:初始化,无通讯;
Pre-Op:邮箱通讯可用,无过程数据;
Safe-Op:过程数据通讯正常,输出锁定在安全态;
Op:正常运行,全功能启用(工作主状态);
Boot:固件升级专用,禁止正常使用。
4. CoE 接口(CANopen over EtherCAT)
作用:设备参数配置、读写诊断数据,参数以索引 + 子索引(十六进制)形式管理;
分区:
0x1000 段:设备身份、版本、序列号等只读信息;
0x6000/0x7000:过程数据 PDO;
0x8000 段:电机、控制核心参数(读写);
数据存储:支持 NoCoEStorage 功能,可关闭参数掉电保存,避免 EEPROM 频繁擦写损坏;
启动列表:可预存参数,设备上电自动加载,更换端子无需重新配置。
5. 分布式时钟(DC)
EtherCAT 分布式时钟,同步精度<100ns,单位 1ns,满足多轴同步运动需求。
安装与接线规范
1. 机械安装
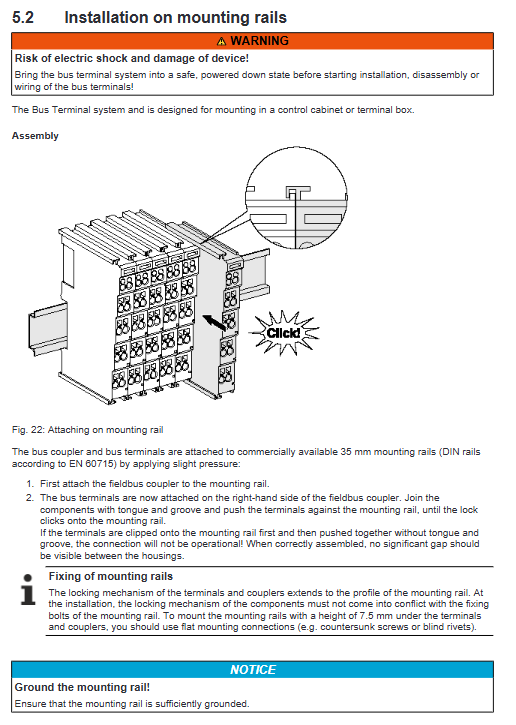
导轨:标准 35mm DIN 导轨,导轨必须可靠接地;
拆装:端子带橙色解锁卡扣,断电后推拉解锁,禁止硬掰;
静电防护(ESD):操作前接地,禁止触碰弹片,总线末端需加装 EL9011/EL9012 端盖;
安装姿态:无风扇时水平安装、底部通风,上下预留≥20mm 空间;加装风扇后可支持其他安装角度;
机械强度:高振动场景需固定导轨、限制端子串长度,满足 EN 60068 振动 / 冲击标准。
2. 接线规则
供电要求:必须使用SELV/PELV 安全超低电压电源,负载回路同样遵循 SELV 规范;
电机接线:严格区分 A1/A2、B1/B2 两相绕组,禁止跨相接线,否则烧毁驱动;支持单 / 双极步进电机;
屏蔽:编码器、信号线必须使用屏蔽双绞线,屏蔽层单点接地;
保险丝:负载回路保险丝需限制短路电流为额定电流的 3 倍(最长 1 秒);
制动处理:短减速斜坡工况,需搭配 EL9576 制动斩波器吸收回馈能量。
3. 端子引脚与 LED
EL7037/EL7047 分别定义编码器、电机、限位、电源引脚,文档附详细引脚图与接线示例;
LED 状态:区分运行、编码器、电源、使能、警告、相故障等,红灯代表硬件故障,黄灯为告警,绿灯为正常状态。
4. 废弃处理
设备属于电子废弃物,需遵循当地电子垃圾法规回收,禁止随意丢弃。
TwinCAT 组态与调试(核心操作)
兼容TwinCAT 2和TwinCAT 3两大版本,支持离线组态(提前配置)、在线扫描(自动识别硬件)两种模式。
1. 前置准备
实时驱动:PC 网口需安装 TwinCAT 实时以太网驱动,区分正确 / 错误驱动配置;
ESI 文件:EtherCAT 设备描述文件,需及时更新,TwinCAT 内置 ESI 升级工具;
离线 / 在线区分:离线 = 无硬件提前编程;在线 = 连接硬件后扫描组态。
2. 组态流程
添加 EtherCAT 设备:在 I/O 设备中添加 EtherCAT 主站,绑定网卡;
扫描端子:在线模式自动识别 EL7037/EL7047,离线手动选择设备型号与修订版;
PDO 配置:预定义多种过程数据方案(速度控制、位置控制、定位接口等),按需选用;
NC 轴集成:将端子关联到 TwinCAT NC 轴,实现伺服式定位控制(支持点位、连续运动)。
3. 核心参数配置(CoE 寄存器)
电机基础参数:额定电压、线圈电阻、电感、反电动势、整步数、编码器分辨率;
控制参数:最大电流、静止降流、步频(速度范围)、反馈类型(内部计数 / 外置编码器);
控制环参数:电流环、速度环、位置环 PID;
缩放系数、参考速度、跟随误差、死区等 NC 轴参数校准。
4. 五大运行模式配置(CoE 0x8012:01 选择)
| 运行模式 | 适配电机 | 编码器要求 | 核心特点 |
| 自动模式(默认) | 全部 | 可选 | 自动切换速度 / 位置模式,推荐常规使用 |
| 直接速度模式 | 全部 | 可选 | 循环给定速度,动态好 |
| 位置控制器模式 | 全部 | 可选 | 循环给定位置,用于定位 |
| 扩展速度模式 | 倍福 AS10xx | 必须 | 矢量控制,低谐振、节能 |
| 扩展位置模式 | 倍福 AS10xx | 必须 | 矢量定位,无失步 |
| 无传感器速度模式 | 倍福 AS10xx | 无需 | 省编码器,中高速运行 |
5. 程序与案例
支持 IEC 61131-3 全编程语言(ST、LD、FBD 等);
提供完整例程:包含轴使能、点动、绝对定位、速度运行、状态监控,搭配可视化界面;
无需 NC 授权时,可使用定位接口,由端子本地闭环,降低控制器负载。
故障诊断与维护
1. 诊断体系
LED 诊断:快速判断电源、使能、相短路 / 过温、编码器故障;
过程数据诊断:读取轴状态、跟随误差、负载、同步错误等;
CoE 诊断寄存器:查看详细故障码、温度、运行数据。
2. 常见故障
通讯故障:检查网线、EtherCAT 状态机、看门狗配置;
电机故障:过温、短路、缺相、失步、谐振;
编码器故障:脉冲丢失、接线错误、计数异常。
3. 固件与维护
固件升级:区分控制器固件(.efw)、FPGA 固件(.rbf),支持单 / 多设备批量升级;
恢复出厂:通过 CoE 寄存器恢复设备默认参数;
备件兼容:高修订版本设备可直接替代低版本。