欢迎浏览厦门控匠自动化科技有限公司


行业资讯
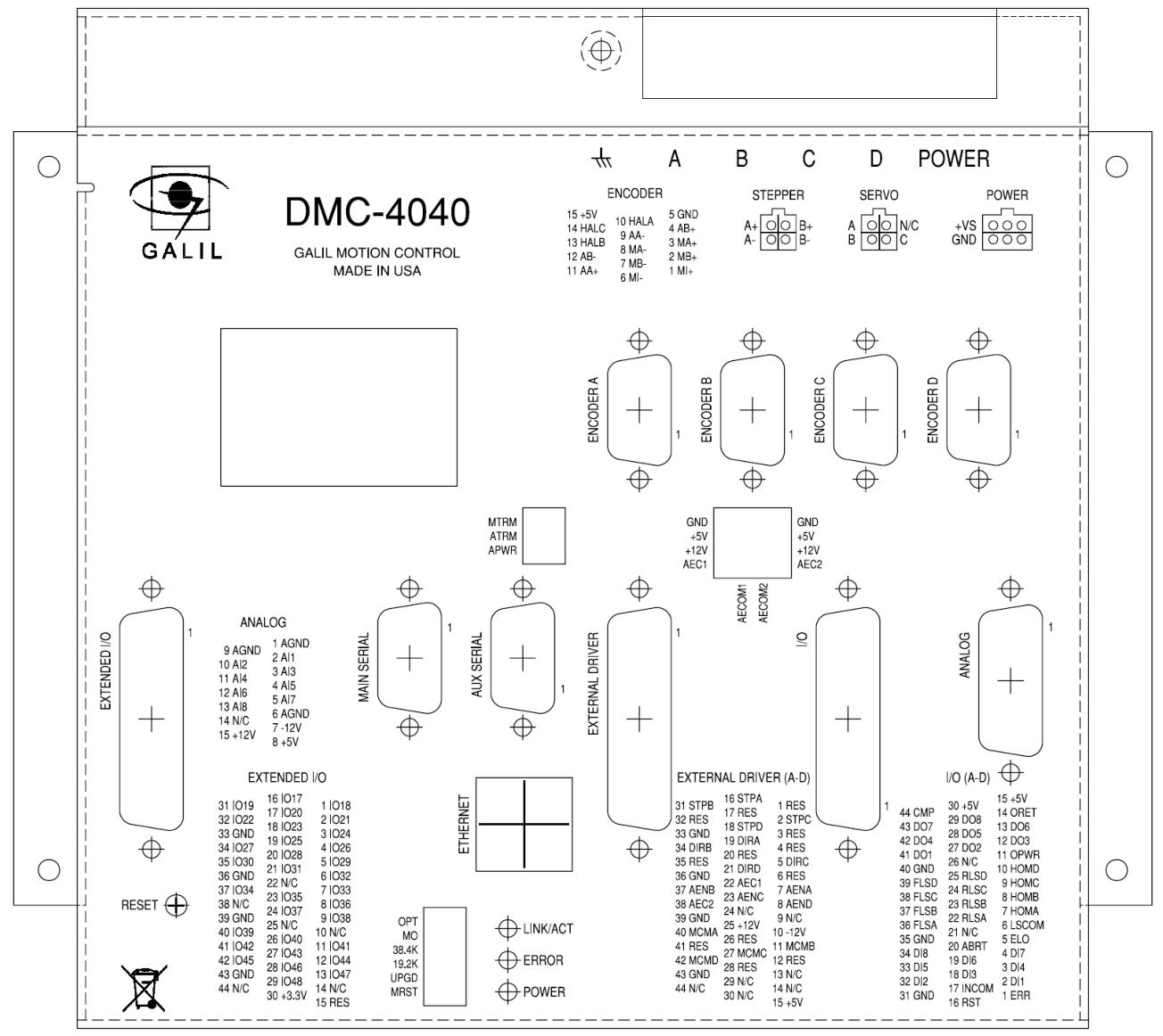
Galil DMC-40x0 系列运动控制器
时间: 2025-07-08浏览次数:
Galil DMC-40x0 系列运动控制器
Galil DMC-40x0 系列运动控制器
概述
控制器简介
DMC-40x0 系列是 Galil 高性能独立控制器,支持高达 8 轴控制,具备高速通信、非易失性程序存储器、更快的编码器速度和改进的 EMI 减少布线。
提供 RS-232(2 通道,最高 115K 波特率)和 10BaseT 以太网两种通信通道,支持高达 2200 万编码器计数 / 秒的高速伺服控制和 600 万步 / 秒的步进电机控制,采样率低至 31.25µsec / 轴。
闪存 EEPROM 提供非易失性存储器,用于存储应用程序、参数、数组和固件,固件可现场升级。
支持的电机类型
带 ±10V 命令信号的标准伺服电机
带正弦换向的无刷伺服电机
带步进和方向信号的步进电机
其他执行器(如液压装置,需联系 Galil 获取更多信息)
外部放大器概述
电流模式放大器:接受 ±10V 范围的模拟命令信号,放大器增益应设置为 + 10V 命令产生最大所需电流。
速度模式放大器:10V 命令信号应使电机以最大所需速度运行。
步进电机放大器:接受步进和方向信号。
Galil 放大器和驱动器概述
A1 – AMP-430x0 (-D3040, -D3020):多轴有刷 / 无刷放大器,每轴可处理 500 瓦连续功率,接受 18-80VDC 直流电源电压。
A2 – AMP-43140 (-D3140):包含四个线性驱动器,用于操作小型有刷伺服电机,需要 ±12–30 直流电压输入,每放大器输出功率 20W,总功率 60W。
A3 – SDM-44040 (-D4040):步进驱动器模块,能够驱动多达四个双极两相步进电机,电流可选 0.5、0.75、1.0 和 1.4 安培 / 相,步进分辨率可选全步、半步、1/4 和 1/16。
A4 – SDM-44140 (-D4140):微步进模块,驱动四个双极两相步进电机,具有 1/64 微步分辨率(SDM-44140 驱动两个),每轴电流可选 0.5、1.0、2.0 和 3.0 安培。
入门指南
布局与尺寸
介绍了 DMC-4040 和 DMC-4080 的布局及尺寸信息。
电源连接
控制器无 Galil 放大器或订购 ISCNTL 电源选项时的电源连接器相关信息,以及带 Galil 集成放大器时的电源连接器信息。
所需元件
包括 DMC-40x0 运动控制器、电机放大器(使用 Galil 放大器和驱动器时集成)、放大器和控制器的电源、带光学编码器的有刷或无刷伺服电机或步进电机、连接到 DMC-40x0 集成 ICM 的电缆、PC(用于 DMC-40x0 的 RS232 或以太网)、GalilTools 或 GalilTools-Lite 软件包。
安装步骤
确定整体电机配置、在 DMC-40x0 上安装跳线、安装通信软件、连接 20-80VDC 电源到控制器、与 Galil 软件建立通信、确定用于正弦换向的轴、连接到放大器和编码器、连接标准伺服电机 / 正弦换向电机 / 步进电机、调整伺服系统。
硬件连接
光隔离输入
包括限位开关输入、原点开关输入、中止输入、ELO(电子锁定)输入、复位输入、未承诺的数字输入等,介绍了其作用、接线和电气规格。
TTL 输入
辅助编码器输入可用于一般用途,每轴有一个辅助编码器,包含两个输入,可接受 TTL 电平信号等。
高功率光隔离输出
介绍了其电气规格和接线方式,5-8 轴控制器的输出 9-16 位于 I/O(E-H)D-Sub 连接器上。
模拟输入
有八个模拟输入,配置为 - 10V 至 10V 范围,可通过 AQ 命令设置不同范围和模式,介绍了其电气规格。
TTL 输出
包括输出比较、错误输出等。
DMC-40x0 控制器的扩展 I/O
提供 32 个扩展 TTL I/O 点,可按 8 位增量配置为输入或输出,介绍了其电气规格。
放大器接口
介绍了其电气规格和概述,以及 ICM-42000 和 ICM-42100 放大器使能电路、ICM-42200 放大器使能电路。
软件工具和通信
RS232 和 RS422 端口
介绍了 RS-232 和 RS-422 配置,包括引脚描述、配置方式、波特率选择和握手等。
以太网配置
支持 TCP/IP 和 UDP/IP 两种行业标准协议,介绍了寻址方式,包括 MAC 地址、IP 地址和 UDP 或 TCP 端口号。
通信协议
介绍了与多个设备通信的方式,以及多播功能。
第三方软件使用
支持 DHCP、ARP、BOOT-P 和 Ping 等用于建立以太网连接的工具,可通过任何能发送 TCP/IP 或 UDP/IP 数据包的应用程序与主机通信,如 Telnet。
Modbus
一种 RS-485 协议,介绍了其功能码、通信级别和示例。
数据记录
可通过 QR 命令提供状态信息块,介绍了数据记录的映射和位字段解释。
GalilTools(Windows 和 Linux)
是 Galil 为当前 Galil 控制器提供的软件工具集,包含多种工具,可在 Windows 和 Linux 平台上运行。
创建自定义软件接口
提供编程工具,如 GalilTools 通信库、ActiveX Toolkit、.NET API 和 DMCWin,方便用户开发自己的自定义软件接口。
命令基础
介绍
提供超过 100 个命令用于指定运动和机器参数,命令可通过 ASCII 或二进制发送。
ASCII 命令语法
指令由两个大写字母 followed by applicable arguments 组成,用分号或回车终止,介绍了指定轴数据和请求动作的语法。
二进制命令语法(高级)
二进制通信模式比 ASCII 命令快约 20%,二进制格式只能从 PC 发送命令,不能嵌入应用程序,介绍了二进制命令格式和表格。
控制器对数据的响应
对有效命令返回 “:”,对无效命令返回 “?”,可通过 TC1 命令请求错误代码。
询问控制器
有一组直接询问控制器的命令,可返回所需数据,介绍了询问命令和操作数。

运动编程
概述
提供多种运动模式,如独立定位和 jogging、协调运动、电子凸轮运动和电子齿轮传动等,介绍了不同模式适用的应用示例。
独立轴定位
各轴运动独立,遵循自己的轮廓,介绍了相关命令和操作数,以及示例。
独立 jogging
可在运动中改变速度、方向和加速度,介绍了相关命令和操作数,以及示例。
位置跟踪
允许在运动中更改绝对位置移动的目标,介绍了其特点和示例。
线性插值模式
多轴运动协调,保持沿指定路径的规定矢量速度、加速度和减速度,介绍了相关命令和操作数,以及示例。
矢量模式:线性和圆弧插值运动
允许规定由线性和圆弧段组成的长 2-D 路径,介绍了相关命令和操作数,以及示例。
电子齿轮传动
最多 8 个轴可与某些主轴线电子齿轮连接,介绍了相关命令和示例,包括斜坡齿轮传动。
电子凸轮
一种运动控制模式,支持多个运动轴的周期性同步,介绍了相关命令和示例。
PVT 模式
允许通过位置、速度和时间为所有 8 个轴定义任意运动轮廓,介绍了相关命令和示例。
多轴协调运动
许多应用需要多个轴以协调方式运动,同时需要平滑运动,介绍了示例。
轮廓模式
允许为 1 至 8 个轴规定任意位置曲线,介绍了相关命令和示例,包括记录和回放功能。
步进电机操作
介绍了步进电机操作的相关命令、平滑功能、使用编码器的方法以及步进位置维护模式(SPM)。
双环(辅助编码器)
除配置为步进电机操作的轴和用于圆形比较的轴外,每个轴都提供第二个编码器接口,介绍了其用途和相关命令。
** backlash 补偿 **
介绍了两种使用辅助编码器进行 backlash 补偿的方法:连续双环和采样双环。
运动平滑
可通过 IT 命令和 KS 命令实现运动平滑,减少系统的机械振动。
回零
可使用 Find Edge(FE)和 Home(HM)指令将电机回零到机械参考点,介绍了回零的步骤和相关命令。
高速位置捕获(锁存功能)
可在外部低输入信号(或索引脉冲)的 25 微秒内捕获主编码器或辅助编码器的位置,介绍了其使用步骤和示例。
快速更新率模式
可以比默认每毫秒快得多的伺服更新率运行,介绍了不同型号控制器的更新率及相关限制。
应用编程
概述
提供强大的编程语言,允许用户为特定应用自定义控制器,程序可下载到 DMC-40x0 存储器中,释放主机用于其他任务。
使用 DMC-40x0 编辑器输入程序
可使用 GalilTools 软件包或 DMC-40x0 提供的行编辑器输入和修改程序,介绍了编辑模式命令。
程序格式
由 DMC 指令组合而成,动作指令与程序流指令结合形成完整程序,介绍了标签的使用和特殊标签。
程序注释
可使用 NO 命令或撇号(')为程序添加注释。
执行程序 - 多任务
可同时运行多达 8 个独立程序(线程),介绍了开始和停止线程的指令。
调试程序
提供有助于调试应用程序的命令和操作数,如跟踪命令、错误代码命令、停止代码命令等。
程序流命令
包括事件触发器和条件跳转,可根据事件发生改变程序流。
数学和函数表达式
提供多种数学运算符和函数,可用于数据操作。
变量
提供 510 个变量,可用于存储可变参数,介绍了可编程变量的定义和赋值。
数组
用于存储和收集数值数据,介绍了数组的定义、赋值、上传和下载,以及自动数据捕获功能。
数据输入(数值和字符串)
可使用 IN 命令提示用户输入数值或字符串数据,介绍了操作员数据输入模式和通信中断的使用。
数据输出(数值和字符串)
可使用 MG 命令输出数值和字符串数据,介绍了消息发送、端口指定和格式设置。
硬件 I/O
介绍了数字输出、数字输入、辅助编码器输入、输入中断功能、模拟输入和扩展 I/O 的使用方法。
示例应用
包括线切割器、X-Y 工作台控制器、通过操纵杆进行速度控制、通过操纵杆进行位置控制、通过采样双环进行 backlash 补偿等示例。
硬件和软件保护
概述
提供多种硬件和软件功能来检查错误条件并在错误时禁止电机,有助于保护各种系统组件免受损坏。
硬件保护
包括输出保护线(如放大器使能、错误输出)和输入保护线(如通用中止、选择性中止、ELO、正向限位开关、反向限位开关)。
软件保护
提供可编程错误限制,可设置位置误差的限制值,介绍了可编程位置限制、Off-On-Error 功能、自动错误程序和限位开关程序。
故障排除
概述
将潜在问题分为安装、稳定性和补偿、操作三类,介绍了各种症状、诊断、原因和补救措施。

操作理论
概述
讨论运动控制系统的操作,典型的运动控制系统由多个元素组成,操作可分为三个级别:闭环、运动轮廓和运动编程。
闭环系统操作
定性和定量地解释了伺服系统的操作,包括闭环控制的原理、不稳定性的原因以及 PID 滤波器的作用。
系统建模
建立了伺服系统各元素的数学模型,如电机 - 放大器、编码器、DAC、数字滤波器和 ZOH。
系统分析
从系统元素的框图模型开始进行分析,确定系统的稳定性。
系统设计和补偿
旨在以交叉频率和相位裕度关闭环路,介绍了分析设计方法。
附录
电气规格
包括伺服控制、步进控制、输入 / 输出和电源要求的电气规格。
性能规格
包括最小伺服环路更新时间、位置精度、速度精度等性能参数。
快速更新率模式
介绍了快速模式下的更新率和禁用的功能。
DMC-40x0 的订购选项
介绍了控制器板选项、CMB 通信板选项、ICM 互连板选项和 AMP 内部放大器选项。
DMC-40x0 的电源连接器
介绍了使用的 Molex 连接器型号和电缆连接。
集成组件
详细介绍了 A1 至 A8 等集成组件的描述、电气规格、 mating 连接器和操作等信息。
