欢迎浏览厦门控匠自动化科技有限公司


行业资讯
YOKOGAWA FA-M3 定位模块(带模拟电压输出)
时间: 2025-10-29浏览次数:
YOKOGAWA FA-M3 定位模块(带模拟电压输出)
YOKOGAWA FA-M3 定位模块(带模拟电压输出)
基础信息与重要声明
1. 适用产品与文档标识
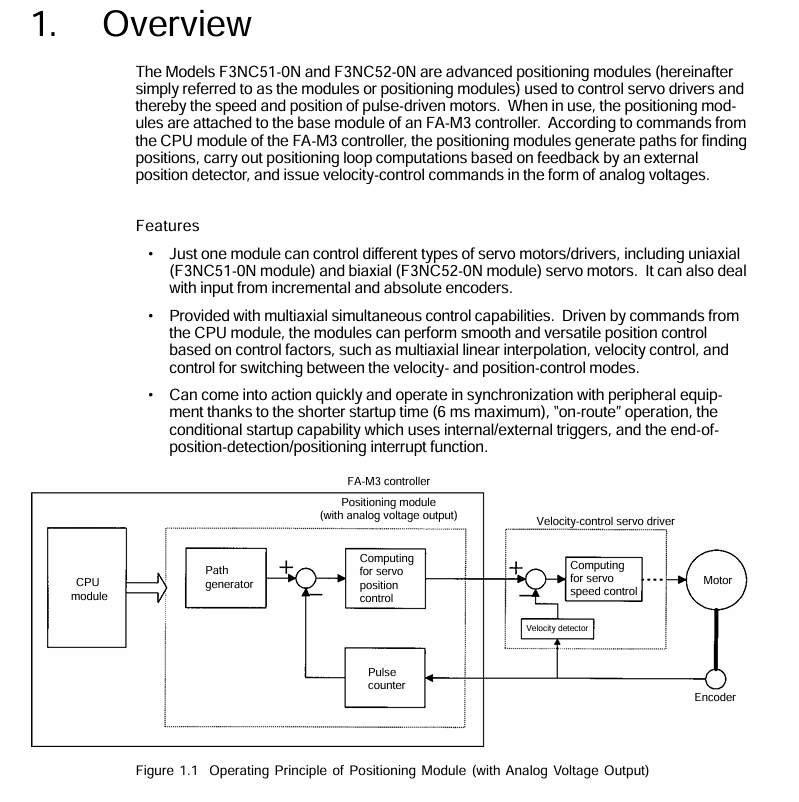
适用产品:FA-M3 系列无范围限制多控制器,具体型号为 F3NC51-0N(单轴定位模块)和 F3NC52-0N(双轴定位模块),功能为带模拟电压输出的定位控制。
文档标识:文档编号 IM 34M6H58-01E,文档型号代码 DOCIM,沟通及额外购买手册时需引用此编号;媒体编号同文档编号(CD 版),版权归 1998 年横河电机所有。
2. 重要声明
手册传递:需传递给最终用户,使用模块前需通读手册以充分了解产品。
内容限制:手册仅说明产品功能,不保证适配用户特定用途;未经许可不得部分或全部转录、复制;内容可能无预告变更。
误差反馈:虽尽力确保内容准确,若发现错误或遗漏,需联系横河电机就近代表处或销售办公室。
免责条款:横河电机仅按单独提供的保修条款对产品提供保证,不对用户使用或产品不可预见缺陷导致的直接 / 间接损失负责;软件仅限指定计算机使用,禁止反向工程、未经许可转让等。
安全预防措施
1. 安全符号定义
符号类型 含义与使用场景
CAUTION(产品 / 手册) 需遵循手册说明,避免人员伤亡、设备损坏,如防触电等危险;手册中该符号还用于提示理解操作和功能的关键信息
WARNING(仅手册) 需参考手册说明,防止硬件 / 软件损坏或系统故障
TIP(仅手册) 提供补充当前主题的信息
SEE ALSO(仅手册) 指明需参考的其他资料来源
2. 核心安全要求
接地要求:使用前必须将功能接地端子(FG)接地,且需独立符合日本工业标准(JIS)3 类接地,接地电阻不超过 100Ω,避免与高压电源线共地。
安装环境:避免安装在阳光直射、温度超出 0-55℃、湿度超出 10%-90%(易结露)、有腐蚀性 / 易燃气体、受机械振动 / 冲击的位置。
操作规范:安装 / 拆卸模块前必须关闭电源;紧固模块安装螺丝和端子螺丝,确保互联电缆连接器牢固并在通电前检查;需用外部继电器构建急停电路,与控制器状态(停止 / 运行)联锁;避免用油漆稀释剂等溶剂清洁,仅用湿布或中性清洁剂擦拭。
部件更换与改装:仅可使用公司指定的部件更换,禁止对产品内部进行改装或添加部件;CPU 模块含内置电池,需避免在高温(存储温度 - 20-75℃)高湿环境存储,以防电池寿命骤减。
静电防护:干燥环境下操作前,需触摸接地金属释放静电。
产品规格
1. 通用规格(核心参数)
项目 F3NC51-0N(单轴) F3NC52-0N(双轴) 说明
控制轴数 1 轴 2 轴 -
控制方式 基于编码器反馈的半闭环控制 基于编码器反馈的半闭环控制 -
模拟电压输出 -10~10V -10~10V 用于速度控制指令
编码器兼容性 增量式编码器(A/B 相,RS422 差分输入,4 倍频时最大 2Mpps);绝对式编码器(横河 Σ 系列、三洋电机制 Manchester 编码系列等,详见 2.4 节) 同单轴 -
控制模式 位置控制、速度控制、速度 - 位置控制模式切换 同单轴 -
位置控制功能 轴独立插值、多轴线性插值、双轴圆弧插值;脉冲范围 - 134217728~134217727 脉冲;脉冲频率 0.1~2000000 脉冲 / 秒;支持绝对 / 相对位置选择、路径中操作、运行中目标位置 / 速度变更、手动脉冲发生器轴步进 同单轴 -
速度控制功能 脉冲频率范围 - 2000000~2000000 脉冲 / 秒;支持运行中速度变更 同单轴 -
加减速方式 梯形、两段式、S 形(三段式)跟踪 同单轴 加减速时间各 0~32767ms
原点搜索 可通过原点设定值、外部触发定义;搜索速度用户可设 同单轴 -
外部触点输入 限位开关、驱动器报警、原点、外部触发、通用输入、急停触点 同单轴 24V DC,4.1mA
外部触点输出 伺服 ON、驱动器复位、制动器 OFF 触点 同单轴 24V DC,0.1A
数据备份 由 CPU 模块负责 同单轴 -
启动时间 最大 6ms 最大 6ms -
电流消耗 5V DC,390mA 5V DC,400mA -
外部电源 24V DC,10mA 24V DC,10mA -
外部接线 40 针连接器(1 个) 40 针连接器(2 个) -
外形尺寸 28.9(宽)×100(高)×83.2(深)mm(不含突起) 同单轴 -
重量 130g 140g -
2. 型号与后缀代码
型号代码 后缀代码 类型 备注
F3NC51 -0N 单轴 位置环控制,-10~10V 电压输出,最大速度 2Mpps
F3NC52 -0N 双轴 位置环控制,-10~10V 电压输出,最大速度 2Mpps
3. 适用编码器
通用两相旋转编码器;
横河电机串行绝对编码器(如 Σ 系列);
三洋电机串行绝对编码器(如 P 系列)或兼容型号(如松下 MINAS 系列,Manchester 编码串行传输)。
4. 模块组件与指示灯
F3NC51-0N(单轴):RDY 指示灯(内部电路正常时常亮)、ERR1 指示灯(出错时亮起)、40 针连接器(连接伺服电机、限位开关等外部 I/O 设备)。
F3NC52-0N(双轴):RDY 指示灯(电路正常常亮)、ERR1 指示灯(1 轴出错亮)、ERR2 指示灯(2 轴出错亮)、2 个 40 针连接器(分别对应 1 轴、2 轴外部设备连接)。
功能概述
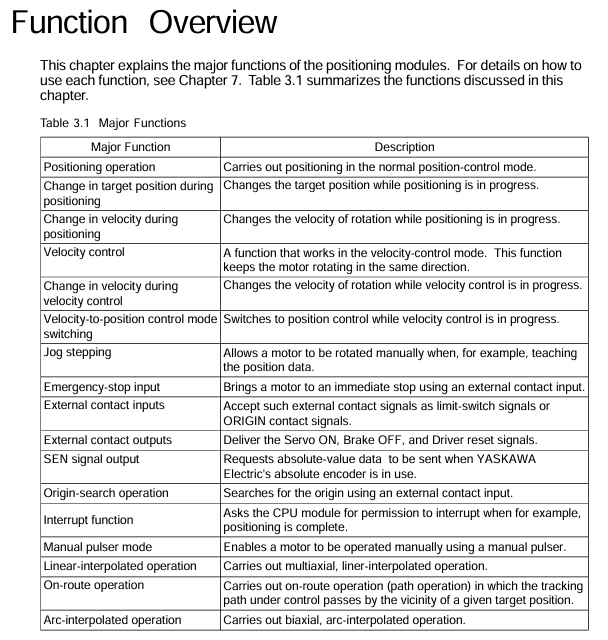
模块核心功能围绕电机的位置控制、速度控制及模式切换展开,支持多种灵活操作,具体如下:
功能名称 核心说明 操作要点
定位操作 按 CPU 模块指令,完成目标位置、速度、加减速等参数设置后,触发 “启动操作指令” 继电器,定位完成后 “定位结束” 继电器动作 可设绝对 / 相对位置;加减速曲线可选梯形 / 两段式 / S 形;可设定位判断范围和超时时间;支持正常启动或等待内 / 外部触发启动
定位中目标位置变更 定位运行中,写入新定位参数并触发 “目标位置变更请求” 继电器,可同步变更速度,支持方向变更(电机先急停再向新目标位置定位) -
定位中速度变更 定位运行中,写入新目标速度并触发 “速度变更请求” 继电器,实现速度实时调整 -
速度控制 写入目标速度(负速度对应反向旋转)、加减速时间等参数,触发 “启动操作指令” 继电器,电机持续旋转,需通过 “减速停止请求” 或 “立即停止请求” 终止 仅支持增量式编码器;加减速曲线同定位操作;支持正常启动或等待内 / 外部触发启动
速度控制中速度变更 速度控制运行中,写入新目标速度并触发 “速度变更请求” 继电器,不支持方向变更(需先减速停止再重新设置方向启动) -
速度 - 位置控制模式切换 速度控制运行中,写入目标位置、速度、加减速等参数,触发模式切换指令,以切换瞬间位置为 “0” 位进入定位操作 可设正常切换或等待外部触发切换;支持检测 Z 相信号切换(需设 Z 相极性和计数频率)
点动步进 写入目标速度、加减速时间等参数,触发 “正向点动步进” 或 “负向点动步进” 继电器,继电器断开时电机按参数减速停止 仅在无错误、伺服 ON、定位结束、位置控制模式且无其他指令执行时生效;仅可通过 “立即停止” 终止,不可用 “减速停止”
急停输入 模块含 1 个急停输入(1 轴连接器专用,双轴共享),为 B 触点输入,必须接线,否则模块不工作,触发后电机立即停止 -
外部触点输入 6 个外部触点输入,功能可通过 “触点输入模式” 定义(如限位、报警、原点、触发等),极性可单独设置,状态可通过应用程序读取 -
外部触点输出 3 个外部触点输出(伺服 ON、制动器 OFF、驱动器复位),功能由对应指令触发,极性可单独设置,状态可通过应用程序读取 -
SEN 信号输出 仅用于连接横河电机绝对编码器,请求发送绝对值数据,其他驱动器连接时需悬空 -
原点搜索操作 写入搜索方向、速度、模式(触点输入检测动作)、Z 相边缘选择等参数,触发 “原点搜索” 继电器,检测到预设外部触点输入或 Z 相信号后减速停止,以检测位置为原点(或原点偏移值) 可分多周期调整参数实现复杂搜索;绝对编码器系统中,横河方法可同增量式编码器搜索,三洋方法不可搜索
中断功能 支持 “位置检测中断”(指令 / 编码器位置达设定值时中断 CPU)和 “定位结束中断”(定位完成时中断 CPU),需参考 CPU 相关手册处理中断 -
手动脉冲发生器模式 触发 “手动脉冲发生器模式 ON” 后,通过手动脉冲发生器控制电机,脉冲输入与电机移动量比例由 “手动脉冲发生器比例值” 设定;双轴可同时设此模式,共享脉冲输入 此模式下不可通过 CPU 指令控制电机;模式 OFF 后恢复位置控制
线性插值操作 双轴同时写入目标速度、位置、加减速等参数(需同加减速时间,速度比 = 移动量比),同步触发 “启动操作指令” 继电器,各轴定位完成后对应 “定位结束” 继电器动作 -
路径中操作 定位运行中启动新定位操作,新操作在当前操作结束前启动,形成路径重叠(路径中区间),无需在中间目标位置停车,支持方向变更 需通过 “剩余减速时间” 状态判断启动时机,避免操作冲突
圆弧插值操作 双轴分别写入圆心位置、半径、起始角度、角度移动量等参数,同步触发 “启动操作指令” 继电器,模块通过三角函数生成圆弧路径 需确保 X/Y 轴参数一致(起始角度、角度移动量等);单轴出错时另一轴继续运行,需通过程序检测错误并停止
参数设置
模块参数分为入口参数(通电后通常仅设一次)、启动参数(定位 / 速度控制等指令执行时参考)、原点搜索相关启动参数、扩展指令参数、控制模式切换参数、圆弧插值参数,核心参数如下:
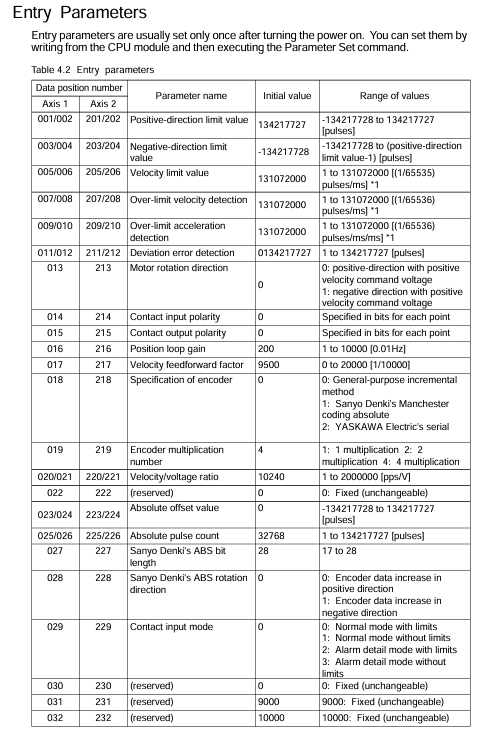
1. 入口参数(关键项)
参数名称 轴 1 数据位置 轴 2 数据位置 初始值 范围 / 说明
正向限位值 001/002 201/202 134217727 -134217728~134217727 脉冲,设物理行程内的位置限制
负向限位值 003/004 203/204 -134217728 -134217728~(正向限位值 - 1)脉冲
速度限制值 005/006 205/206 131072000 1~131072000(1/65536)脉冲 /ms,限制路径生成速度
超速检测值 007/008 207/208 131072000 1~131072000(1/65536)脉冲 /ms,检测电机实际速度超限
超加速检测值 009/010 209/210 131072000 1~131072000(1/65536)脉冲 /ms/ms,检测电机实际加速度超限
偏差错误检测值 011/012 211/212 134217727 1~134217727 脉冲,检测指令位置与编码器反馈位置偏差超限
电机旋转方向 013 213 0 0:正速度指令电压对应正向旋转;1:正速度指令电压对应反向旋转
编码器规格 018 218 0 0:通用增量式;1:三洋 Manchester 编码绝对式;2:横河串行绝对式
速度 / 电压比 020/021 220/221 10240 1~2000000 pps/V,计算式:(电机额定转速 × 编码器脉冲数 / 分钟)÷ 额定电压
2. 其他参数(核心项)
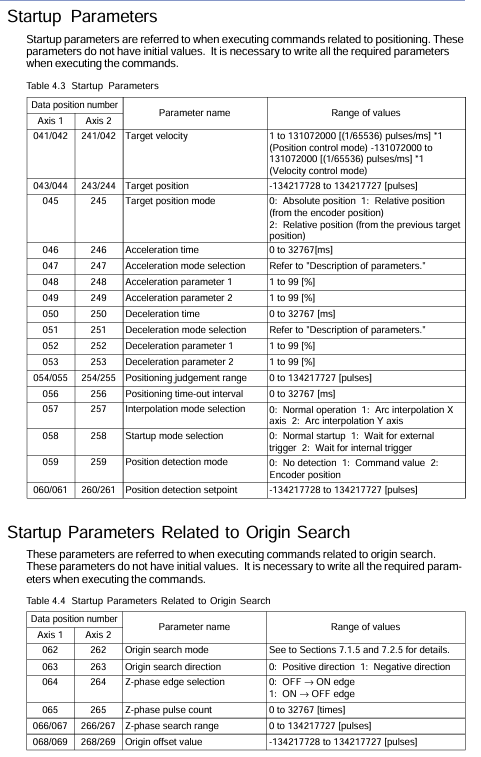
启动参数:含目标速度、目标位置、目标位置模式(绝对 / 相对)、加减速时间 / 模式 / 参数、定位判断范围、超时时间、插值模式、启动模式、位置检测模式 / 设定值等,无初始值,需指令执行前写入。
原点搜索参数:含原点搜索模式(触点检测动作)、搜索方向、Z 相边缘选择、Z 相脉冲计数、Z 相搜索范围、原点偏移值,无初始值。
扩展指令参数:含扩展指令类型(伺服 ON/OFF、制动器 ON/OFF、驱动器复位等)、静态偏差调整量、手动脉冲发生器比例值,无初始值。
圆弧插值参数:含圆心位置、半径、起始角度、角度移动量、角度目标速度、加减速时间、目标位置、修正脉冲范围,无初始值。
3. 参数设置示例
以 “电机额定转速 3000rpm、额定电压 6V,编码器 8192 脉冲 / 转(4 倍频),滚珠丝杠螺距 5mm / 转,运行范围 - 500~1000mm” 为例,关键入口参数计算如下:
正向限位值:1000mm÷5mm / 转 ×8192 脉冲 / 转 = 1638400 脉冲;
负向限位值:-500mm÷5mm / 转 ×8192 脉冲 / 转 =-819200 脉冲;
速度限制值:(100mm/s÷5mm / 转 ×8192 脉冲 / 转)÷1000×65536=10737418(1/65536)脉冲 /ms;
速度 / 电压比:(3000rpm×8192 脉冲 / 转 ÷60s / 分)÷6V=68267 pps/V。
状态与 I/O 继电器
1. 状态监测
模块状态需通过 CPU 模块读取,核心状态项如下(2 字数据需按 “低字 + 高字” 读取,部分为定点数据):
状态名称 轴 1 数据位置 轴 2 数据位置 说明
错误状态 101 301 错误发生时存储错误代码,无错误时无意义
触点输入状态 103 303 存储外部触点输入(含急停)状态,1 位对应 1 个输入,极性按参数定义
指令位置当前状态 104/105 304/305 模块生成的路径位置,非电机实际位置,单位脉冲
编码器位置当前状态 108/109 308/309 编码器反馈的电机实际位置,单位脉冲
目标位置状态 112/113 312/313 定位操作的目标位置(按目标位置模式计算后的值)
扩展状态 114 314 存储运行状态(加速 / 匀速 / 减速、模式等待、控制模式等),按位解析
剩余减速时间 115 315 定位中到目标位置的剩余减速时间,0 = 路径生成停止,-1 = 加速 / 匀速
2. I/O 继电器(接口 CPU 模块)
输出继电器(32 个 / 轴,F3NC51-0N 的 2 轴继电器无效):核心包括启动操作指令(YⅢ33/49)、扩展指令(YⅢ34/50)、减速停止请求(YⅢ35/51)、立即停止请求(YⅢ36/52)、原点搜索启动(YⅢ37/53)等,Ⅲ 为模块所在 FA-M3 插槽号。
输入继电器(32 个 / 轴,F3NC51-0N 的 2 轴继电器无意义):核心包括启动操作指令确认(XⅢ01/17)、扩展指令确认(XⅢ02/18)、减速停止确认(XⅢ03/19)、原点搜索结束(XⅢ05/21)、定位结束(XⅢ14/30)、错误通知(XⅢ12/28)等。