欢迎浏览厦门控匠自动化科技有限公司


行业资讯
KOLLMORGEN P70360 高性能微步进驱动器
时间: 2025-08-25浏览次数:
KOLLMORGEN P70360 高性能微步进驱动器
KOLLMORGEN P70360 高性能微步进驱动器
基础信息
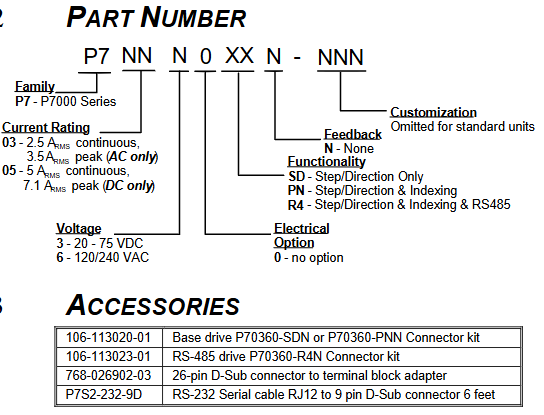
核心定位:P70360 为交流输入微步进驱动器,支持 120/240 VAC 供电,最大输出电流 2.5 A RMS(峰值 3.5 A RMS),集成 Dynamic Smoothing™(动态平滑)、Multi-Stepping™(多步进)、Encoderless Stall Detection™(无编码器堵转检测)等专利技术,需搭配 Kollmorgen 推荐步进电机(如 T2x/N3x/K3x 系列)使用,通过开关或 P7000Tools 软件实现参数配置。
版本迭代:文档历经 7 次修订(1-G 版),最新 G 版主要更新过时引脚编号、补充 J4-18 引脚警示、更新品牌标识,修正电机选型章节内容,确保与固件版本 2.10 及以上兼容。
驱动器核心技术参数与硬件特性
(一)通用技术参数
类别 参数项 规格
电源特性 输入电压 120/240 VAC(50/60 Hz),对应直流母线电压 320 VDC(可选 160 VDC 母线)
最大输出功率 350 W(240 VAC 输入)
母线电压保护 欠压故障 130 VDC,过压故障 440 VDC,再生电压 420 VDC
浪涌电流 峰值 30 A(脉冲宽度 4 ms),推荐慢熔保险丝 7 A
电机适配 电机电感范围 320 VDC 母线:50~200 mH;160 VDC 母线:7~30 mH
电机电缆长度 最大 20 m(24 AWG 电缆)
步进分辨率 200~50000 步 / 电机转(通过 S2-2~S2-4 开关设置)
I/O 特性 步进 / 方向输入 电压 2.5~5.5 VDC,电流 5~20 mA,最高频率 2 MHz,最小脉宽 250 ns
通用输入(9 路) 电压 3.5~24 VDC,电流 10 mA,响应时间 ≤250 μs
通用输出(2 路) 最大电压 30 VDC,最大电流 10 mA,响应时间 ≤250 μs
环境适应性 工作温度 0~40 °C
存储温度 -20~+70 °C
湿度 90% 相对湿度(无冷凝)
海拔 ≤1500 m(5000 ft)
污染等级 II 级
(二)硬件特性与可选配置
核心功能
动态平滑(Dynamic Smoothing™):二阶低通滤波器减少运动冲击,降低机械共振,通过 S2-8/S2-9 开关设置平滑等级(最小 / 中等 / 重度 / 激进)。
无编码器堵转检测(Encoderless Stall Detection™):通过内部电机模型监测指令位置与实际位置偏差,偏差超 2 个全步时触发故障,通过 S2-12 开关启用。
电流降低(Current Reduction):电机静止 100 ms 后自动将电流降至额定值的 75%(可通过软件调整比例与延迟),S2-10 开关控制启用 / 禁用。
多步进(Multi-Stepping™):增强型滤波功能,将低分辨率输入(如 200/400 步 / 转)平滑为微步进输出,S2-11 开关启用。
型号差异
P70360-SDN:基础版,仅支持步进 / 方向控制,默认通用输入配置为 Jog±/EOT±/ 故障复位。
P70360-PNN:进阶版,支持步进 / 方向与索引功能,额外增加 MV SEL 1-4 输入用于多段速选择。
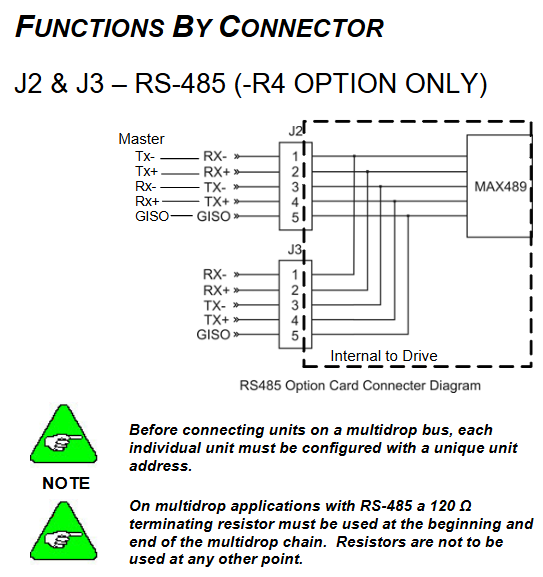
P70360-R4N:带 RS-485 通信版,支持多机联网(需配置唯一节点地址),新增 J2/J3 连接器用于 RS-485 总线。
硬件安装与电气接线规范
(一)机械安装要求
安装准备
安装面:需为冷板(推荐铝制),使用 8-32 或 M4 螺丝固定,驱动器直立安装(散热片鳍片朝左),周围预留至少 25.4 mm(1 in)散热空间,避免热源直接照射。
温度控制:散热片温度超 70 °C 时驱动器将过热停机,环境温度超 40 °C 需增加风扇冷却或降低负载占空比。
安装尺寸
基础版(无 RS-485):长 170.18 mm(6.700 in)、宽 132.21 mm(5.205 in)、高 52.324 mm(2.060 in)。
带 RS-485 版:长 170.18 mm(6.700 in)、宽 132.21 mm(5.205 in)、高 58.217 mm(2.292 in)。
(二)电气接线规范
接线安全与顺序
断电操作,确保驱动器电容放电(断电后≥2 分钟,测量直流母线电压<40 V),所有动力电缆与控制电缆需单独屏蔽,屏蔽层两端接地。
动力电缆(电机 / 电源)与控制电缆(步进 / 方向 / I/O)间距≥20 cm,避免交叉干扰;电缆长度超 25 m 时需搭配 Kollmorgen 3YL-20 扼流圈(如 SERVOSTAR 601-606 配 4×1 mm² 电缆)。
核心连接器定义
J4(26 针 command I/O):包含步进(J4-1/2)、方向(J4-3/4)、使能(J4-5/6)输入,故障输出(J4-7/8),9 路通用输入(J4-10~18),通用输出(J4-21/22),5 V 电源(J4-19/25)。
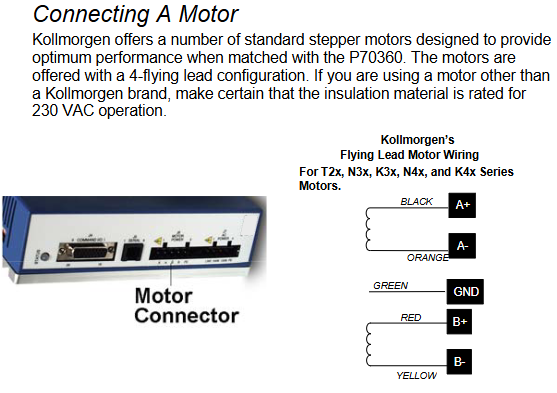
J6(电机电源):4 极连接器,A+/A-(黑 / 橙)、B+/B-(红 / 黄)接电机绕组,PE(绿黄条纹)接电机机壳,需注意电机转向(交换 A± 或 B± 可反转)。
J7(AC 电源):4 针连接器,J7-1 接 120/240 VAC 火线,J7-2 接 240 VAC 零线,J7-3 接 120 VAC 零线,J7-4 接保护地(PE),禁止将 240 VAC 接入 J7-3。
J2/J3(RS-485,仅 R4N 版):5 针连接器,J2-1/RX+、J2-2/RX-、J2-3/TX-、J2-4/TX+、J2-5/GISO(隔离地),总线首尾需接 120 Ω 终端电阻。
典型接线方案
差分步进 / 方向:控制器差分输出接 J4-1(STEP+)/J4-2(STEP-)、J4-3(DIR+)/J4-4(DIR-),电缆使用屏蔽双绞线,屏蔽层两端接地。
开集电极单端信号:控制器开集电极输出接 J4-1(STEP+)/J4-3(DIR+),J4-2/J4-4 接地,需外接上拉电阻(电压>5 V 时需串联限流电阻,公式 R CL=(V s−5)×100)。
通用输入(如 Jog+):使用内部 5 V 电源时,J4-14(DIN5)接按钮一端,按钮另一端接 J4-20(Pull Up/Dn);使用外部 24 V 电源时,需串联限流电阻(同上)。
参数配置与软件操作
(一)开关配置(硬件快速设置)
通过驱动器顶部 S1(电机选择)和 S2(功能配置)开关进行基础参数设置,无需软件即可启动:
电机选择(S1 + S2-1):S1 选择电机系列(如 S1=1 对应 T21…C 系列,S1=4 对应 N31…G 系列),S2-1 选择电机类型(OFF 为标准系列,ON 为 CTM/CTP 系列),CTP 电机需额外配置散热板(等效 4.125×4.125×0.25 in 铝板),否则需降额 25% 电流。
步进分辨率(S2-2~S2-4):支持 8 档分辨率,如 ON/ON/ON 对应 200 步 / 转,OFF/OFF/OFF 对应 25000 步 / 转。
负载惯量比(S2-5~S2-7):根据负载 - 转子惯量比设置(0-1 至 20-32),用于优化抗共振增益,如 OFF/OFF/OFF 对应 0-1,ON/ON/ON 对应 20-32。
功能开关(S2-8~S2-12):动态平滑(S2-8/S2-9)、电流降低(S2-10)、多步进(S2-11)、堵转检测(S2-12),ON 为启用,OFF 为禁用。
(二)P7000Tools 软件配置(进阶设置)
软件安装与连接
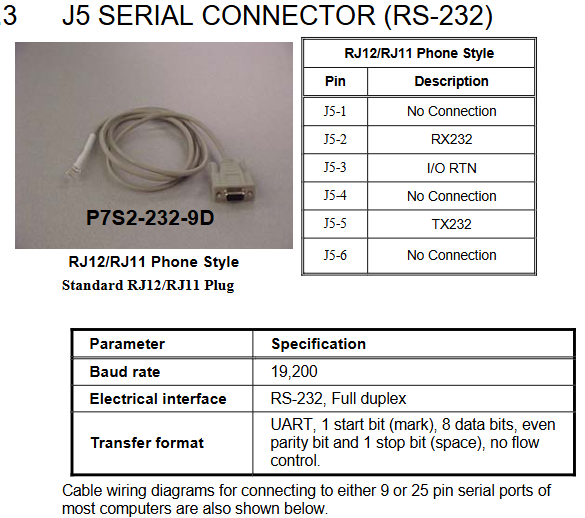
安装 P7000Tools(支持 Windows 系统),通过 RS-232 电缆(P7S2-232-9D,RJ12 转 9 针 D-Sub)连接 PC 与驱动器 J5 接口,波特率默认 19200,数据位 8、偶校验、停止位 1。
启动软件后通过 “Scan for Connected” 扫描驱动器,首次连接需配置节点地址(1-99),确保与硬件开关无冲突。
核心配置模块
电机配置:选择电机型号(或通过 “Motor File Editor” 创建自定义电机,输入额定电流、极数、峰值扭矩等参数),执行 “Probe Stepper Motor” 检测电机电感,优化控制算法。
机械参数:设置用户单位(步数 / 转 / 毫米 / 英寸)、齿轮比(如 2:1 齿轮箱设为 2 电机转 / 负载转)、负载惯量,用于运动 Profile 计算。
指令配置:设置步进分辨率(与硬件开关一致)、旋转极性(反转电机转向)、使能极性(Active Open/Closed)、速度 / 加减速限制, Jog 速度分为高低两档(如高速 20 转 / 秒,低速 0.5 转 / 秒)。
I/O 配置:自定义 9 路通用输入(如 Jog+/Jog-/EOT+/EOT-/ 故障复位 / 启动移动)、输入去抖时间(默认 1 ms)、通用输出功能(如电机运行 / 堵转 / EOT 锁存)。
高级设置:调整抗共振频率(公式
AResFrequency= 100⋅J Rotor ToothCount⋅T max)、动态平滑频率(公式 SmoothingFrequency= 9⋅J Rotor ToothCount⋅T max)、电流降低比例与延迟。
运动 Profile 生成
支持 63 个独立运动 Profile,分为 AVD(加速度 - 速度 - 距离)和 T/D(时间 - 距离)两种模式,可设置加减速、目标速度、运动距离、延迟时间、跳转索引(链式运动)。
通过 “Move Select” 输入(最多 6 路,二进制编码)选择 Profile,如输入 1+2 触发 Profile 3,需配置 “Start Move” 输入触发运动(边缘触发)。