欢迎浏览厦门控匠自动化科技有限公司


行业资讯
HIMA Z7138 通过将未使用的参数设置为零来实现
时间: 2024-01-11浏览次数:
HIMA Z7138 通过将未使用的参数设置为零来实现虽然PID控制器有三个控制项,但有些应用只需要一两项就能提供适当的控制。这是通过将未使用的参数设置为零来实
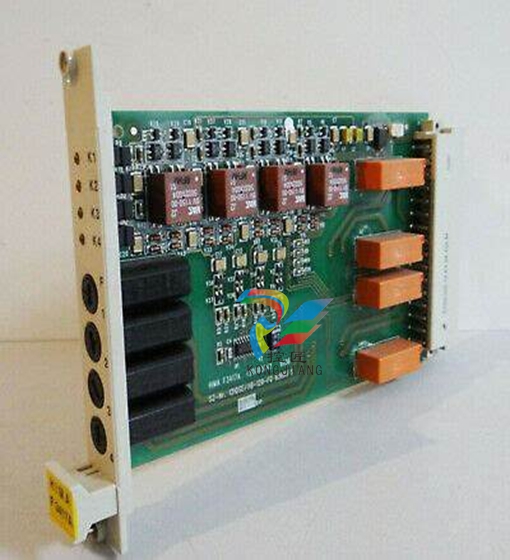
HIMA Z7138 通过将未使用的参数设置为零来实现
虽然PID控制器有三个控制项,但有些应用只需要一两项就能提供适当的控制。这是通过将未使用的参数设置为零来实现的,并且在没有其他控制动作的情况下被称为PI、PD、P或I控制器。PI控制器在微分作用对测量噪声敏感的应用中相当常见,但系统要达到其目标值往往需要积分项。
PID算法的使用不能保证最优控制系统或其控制稳定 (参见限制,如下)。可能出现过度延迟的情况:过程值的测量被延迟,或者控制动作应用得不够快。在这些情况下超前-滞后补偿是有效的。控制器的响应可以用它对误差的响应度、系统过冲设定点和任何系统的程度振动。但是PID控制器具有广泛的适用性,因为它只依赖于测量过程变量的响应,而不依赖于基础过程的知识或模型。
HIMA 984862765
HIMA 984862702
HIMA F8650X
HIMA F3236
HIMA F3330
